Wheel type double-arm indoor transport robot
A robot and dual-arm technology, applied in manipulators, manufacturing tools, etc., can solve problems such as poor human-computer interaction, low degree of automation and intelligence, and unreasonable structure settings
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0066] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
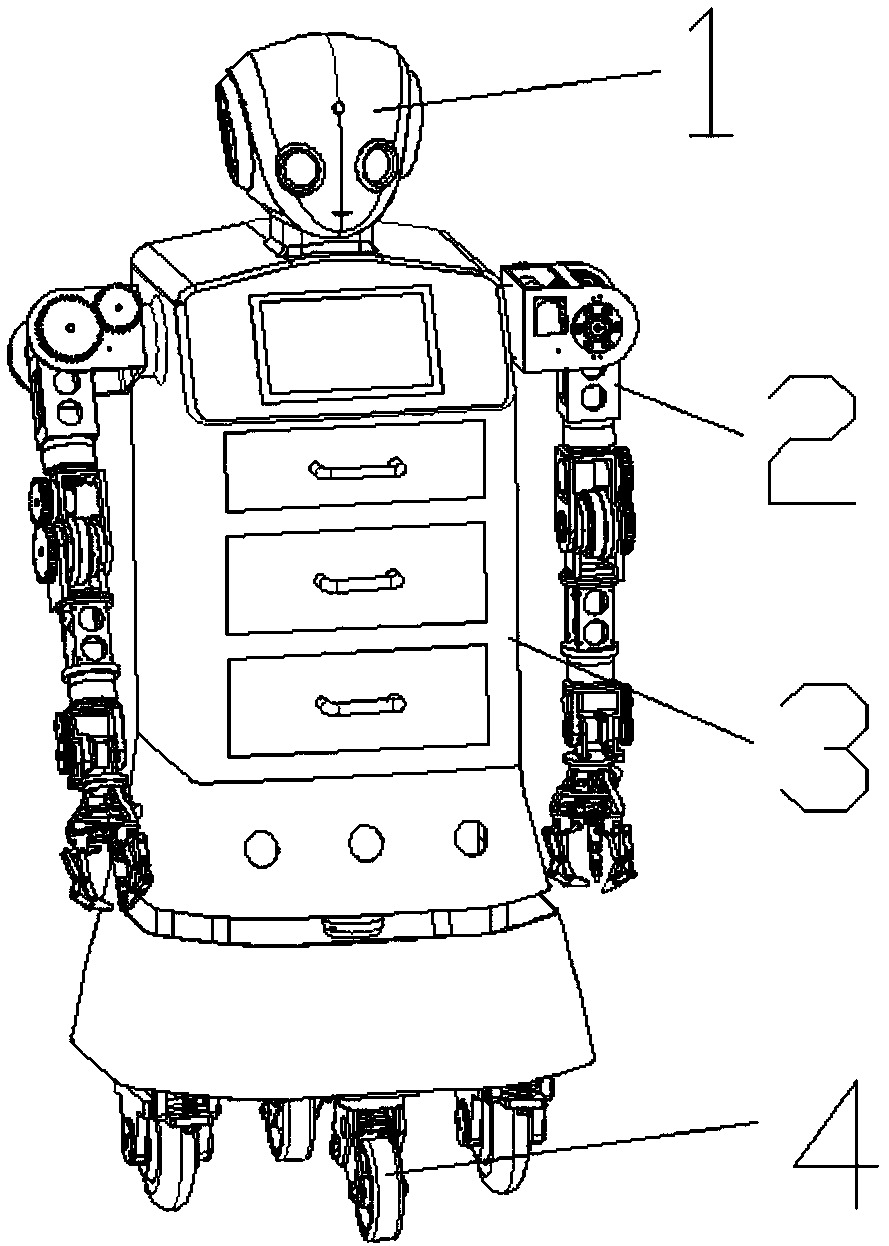
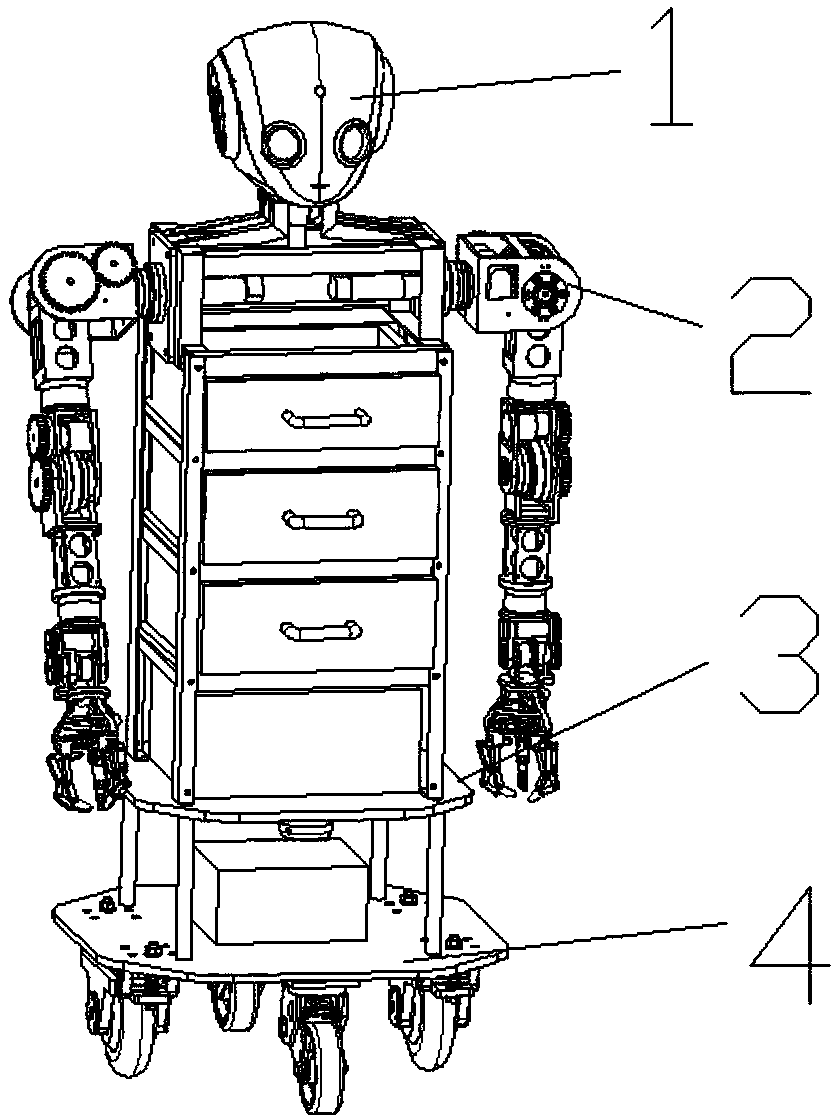
[0067] figure 1 It is a three-dimensional structural view of the wheeled dual-arm indoor transport robot in the embodiment of the present invention, figure 2 It is a three-dimensional structural view of the wheeled dual-arm indoor transport robot (with the fuselage shell assembly removed) in the embodiment of the present invention.
[0068] Such as figure 1 and figure 2 As shown, the embodiment of the present invention provides a wheeled dual-arm indoor transp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More