

Foresight anti-lock dynamic allocation method for multi-mobile robot system grid points based on grid map
A mobile robot and grid map technology, applied in the field of mobile robots, can solve problems such as reducing system efficiency, path conflict, and waiting for a long time for robots to avoid loop deadlock and improve overall efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be further described below in conjunction with the accompanying drawings.
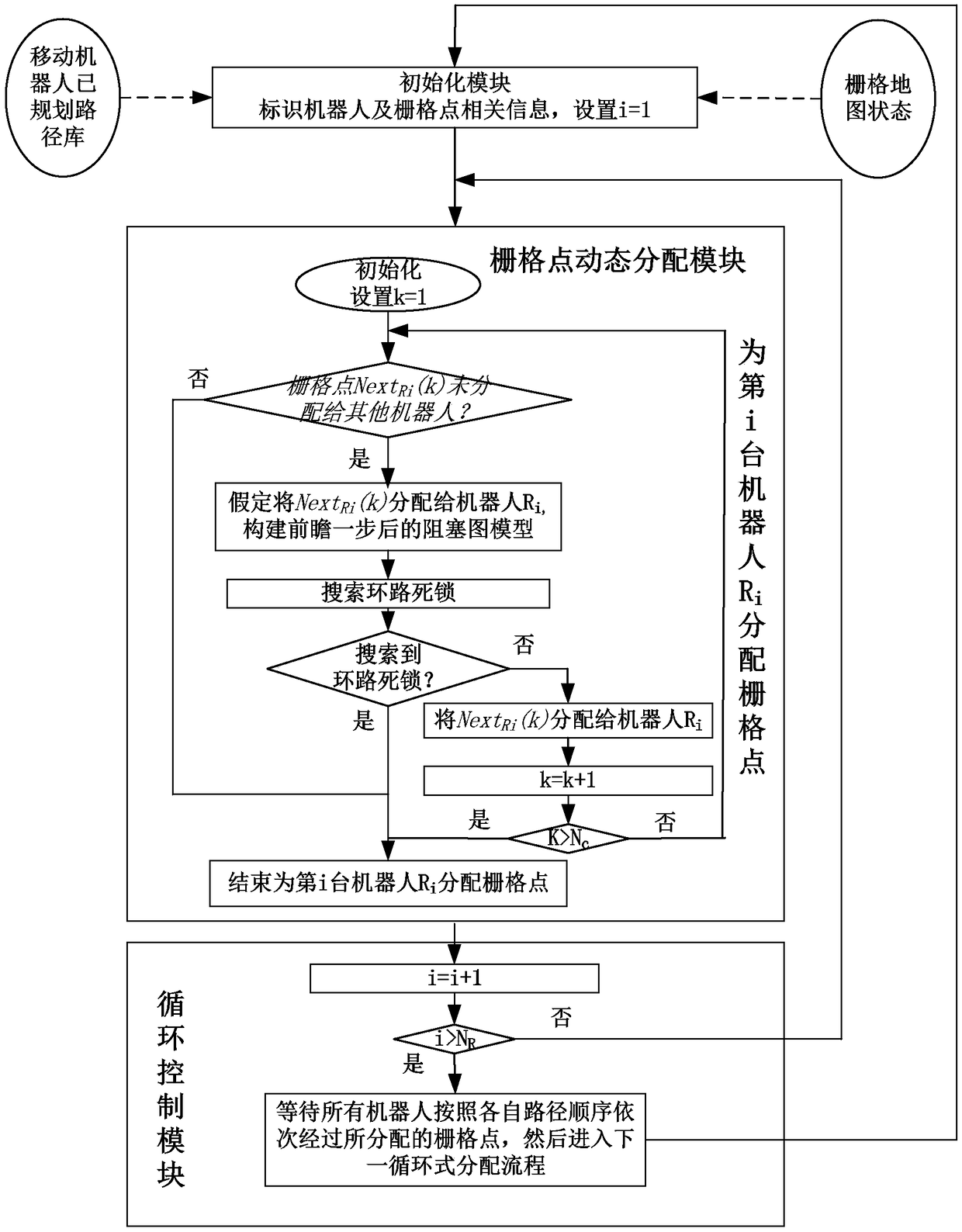
[0032] figure 1 Shown is the overall flow chart of the present invention
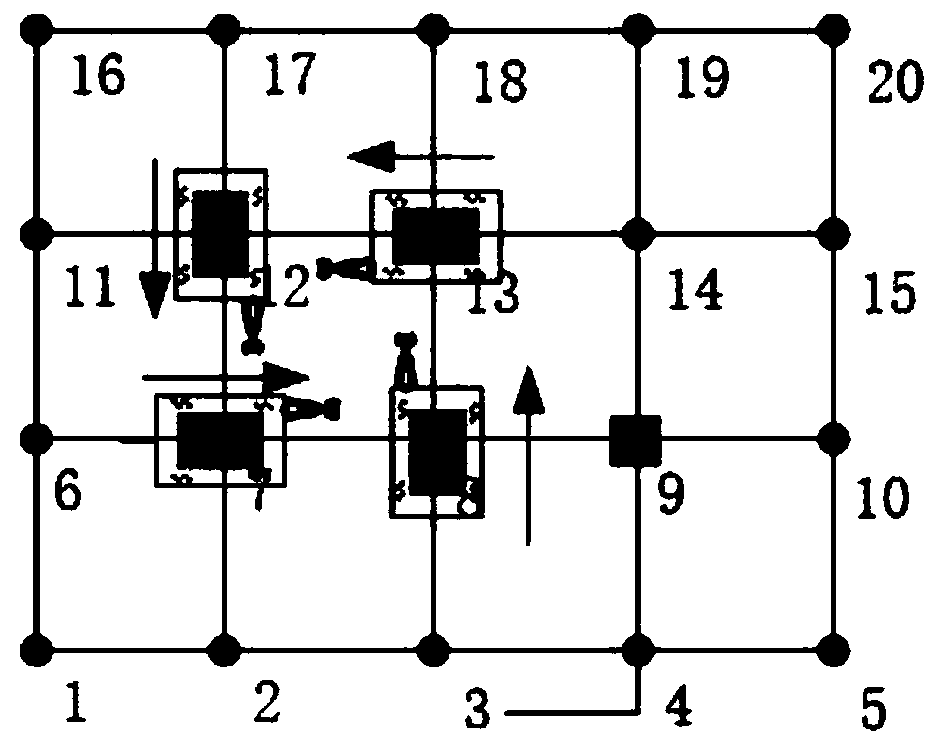
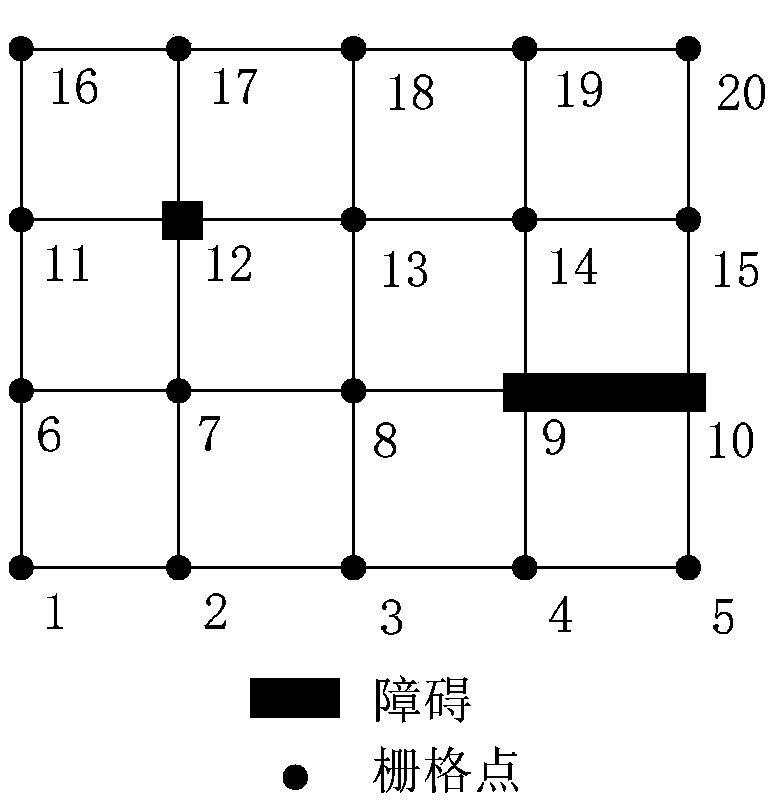
[0033] The multi-mobile robot system based on grid map is composed of grid map and several mobile robots. N R is the number of mobile robots in the system. A grid map can be described by a graph G(V, E), where V={v j |j∈N and 1≤j≤N V} represents the set of grid points, N V is the number of grid points in the grid map, N represents a positive integer, E represents the set of grid edges, E={e ij | e ij =(v i , v j ), where v i , v j ∈V and v i ≠ v j}, N E is the number of grid edges, v i called edge e ij the starting point of v j called edge e ij end point. The mobile robot can run bidirectionally along the direction of the grid edge, but it can only dock at the grid point. Since multiple mobile robots share the same grid map, conflicts between robots are inevitable. In order to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More