

A real-time path planning method for UAV based on improved rrt
A real-time path planning and unmanned aerial vehicle technology, applied in the direction of navigation computing tools, etc., can solve problems such as limitations, large range, and reduced use efficiency, and achieve the effect of reducing the amount of calculation, reducing the range, and realizing online planning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
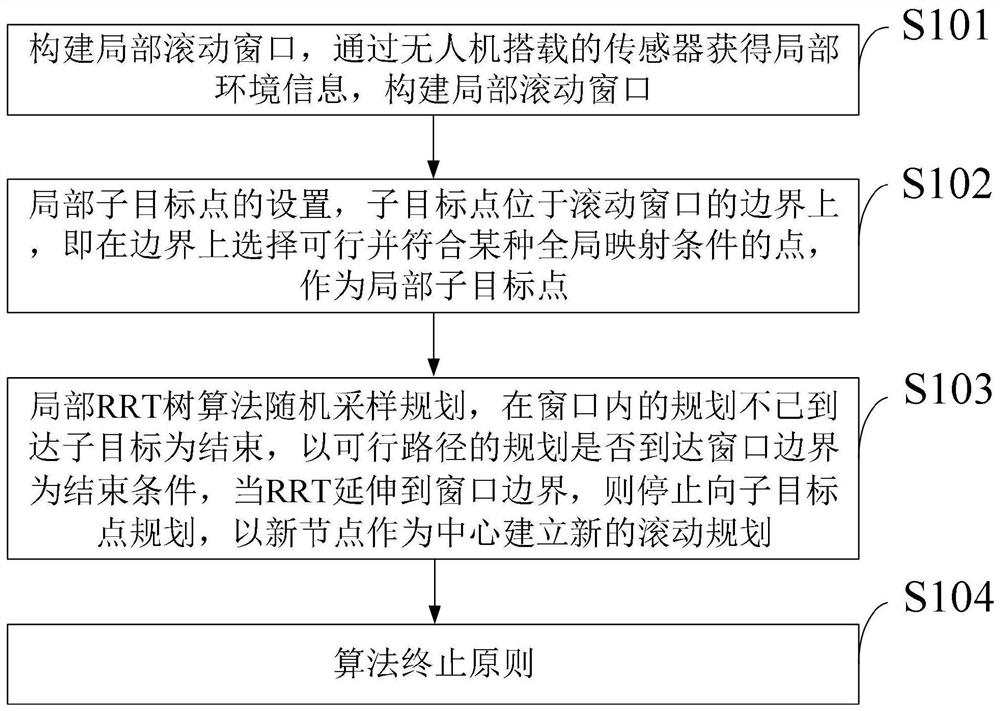
[0092] 1. Build a partial scrolling window
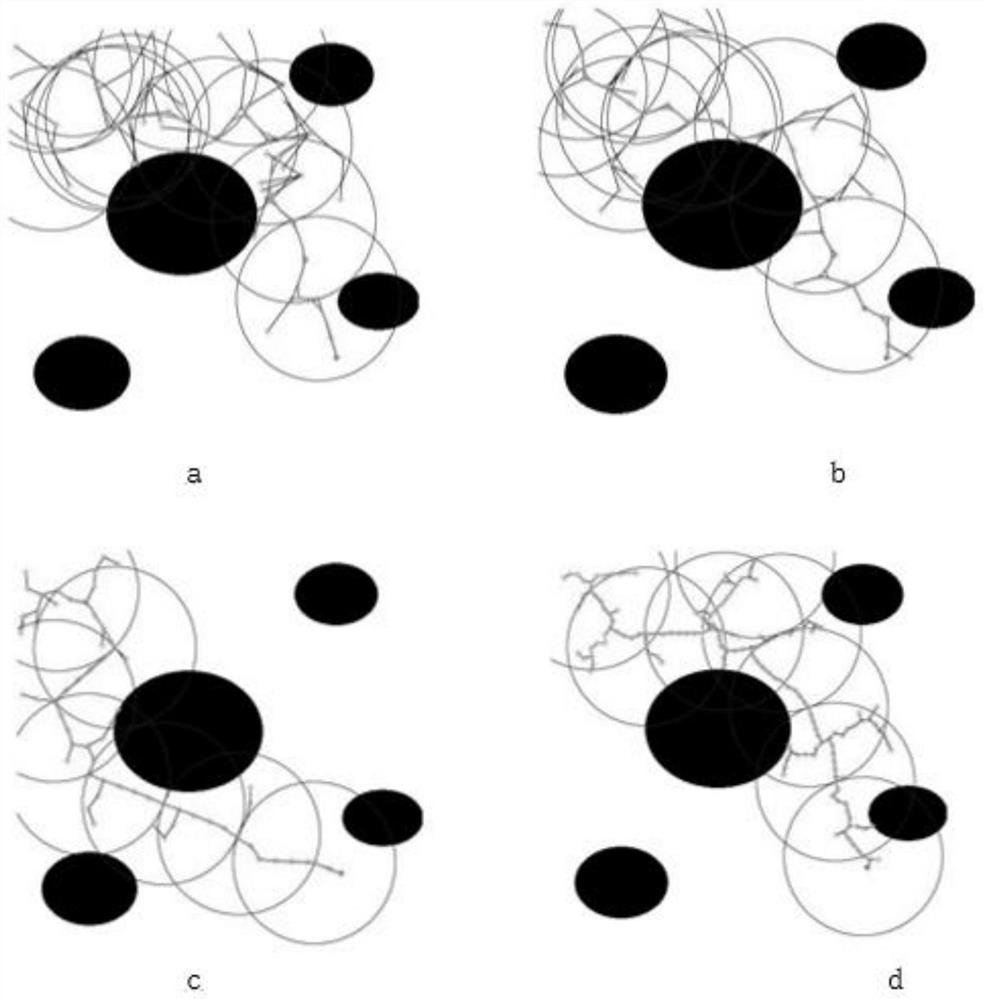
[0093] The local environmental information is obtained through the sensors carried by the UAV, and the planning window is driven in a periodic form. The window area of each planning is defined as Win(q_R(t))={p|p∈C,d(q, q_R(t))≤R}, q_R(t) represents the center of the rolling window, R is the radius of the rolling window, generally the detection radius of the sensor. The aforementioned window is also referred to as the field of view of the drone.
[0094] Since the drone is in the process of real-time route planning and autonomous navigation, it is best to maintain a certain speed and fly continuously without stopping to wait for the next window planning to generate a path before proceeding. Therefore, in order to fly continuously, it is necessary to plan the next window in advance before reaching the local sub-target point, and take the current planned target point as the center of the next planning window. That is, after the ne...
Embodiment 2
[0114] The general flow of the rolling RRT algorithm provided by the embodiment of the present invention is as follows:
[0115] (1) initialize the variables of the RRT tree in the rolling window;
[0116] (2) judge whether it is located in the rolling window, if it is then go to step 3, not go to step 4;
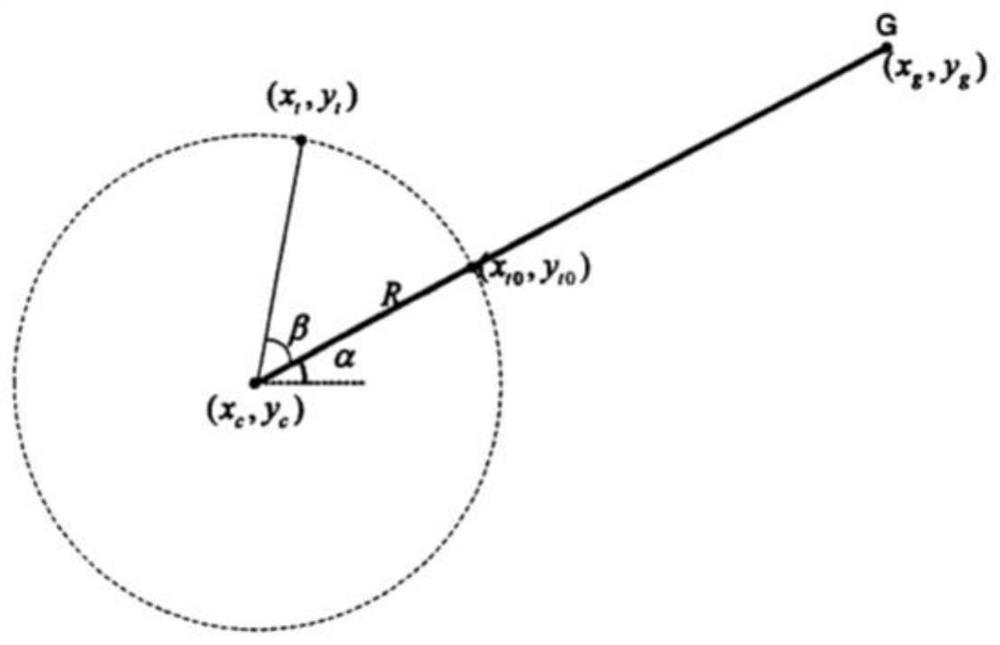
[0117] (3) As the target point, randomly generate nodes on the boundary
[0118] (4) Obtain local sub-target points on the rolling window boundary, and generate random nodes on the boundary;
[0119] (5) Select the nearest tree node in the current tree species, and generate nodes according to a certain step size;
[0120] (6) Collision detection is performed on the connection line;
[0121] (7) Judging whether it is in the flyable zone and there is no obstacle distribution on the connection line, if not satisfied, return to step 2, and if satisfied, go to step 6;
[0122] (8) will join the tree list, judge to arrive, if not then go to step 9; Yes then end the algorithm;...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More