

Hybrid path planning method based on FLOYD and Astar
A hybrid path and optimal path technology, applied in transportation and packaging, two-dimensional position/channel control, vehicle position/route/height control, etc., can solve the problem of inability to guarantee path drivability, time-consuming, and reduce path search Time and other issues, to achieve online planning and dynamic global obstacle avoidance, to ensure the effect of global optimality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] The present invention will be further described in detail below in conjunction with the embodiments and the accompanying drawings, but the embodiments of the present invention are not limited thereto.
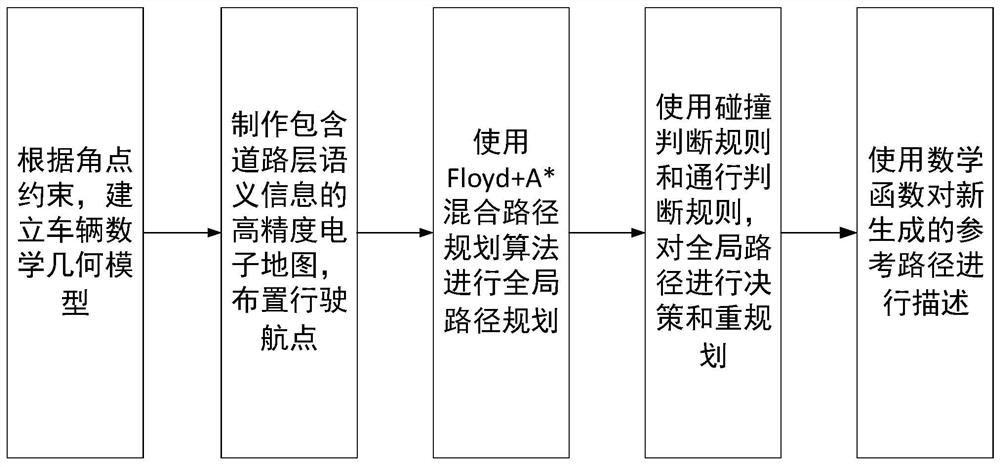
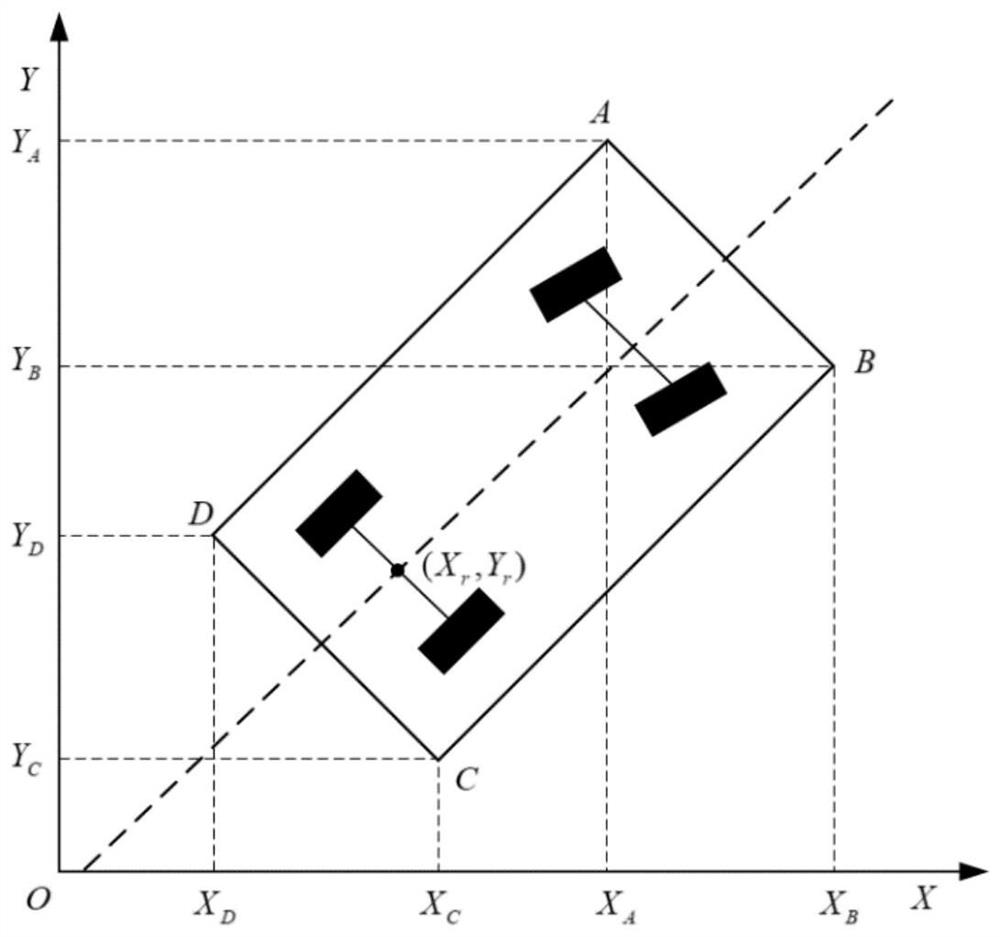
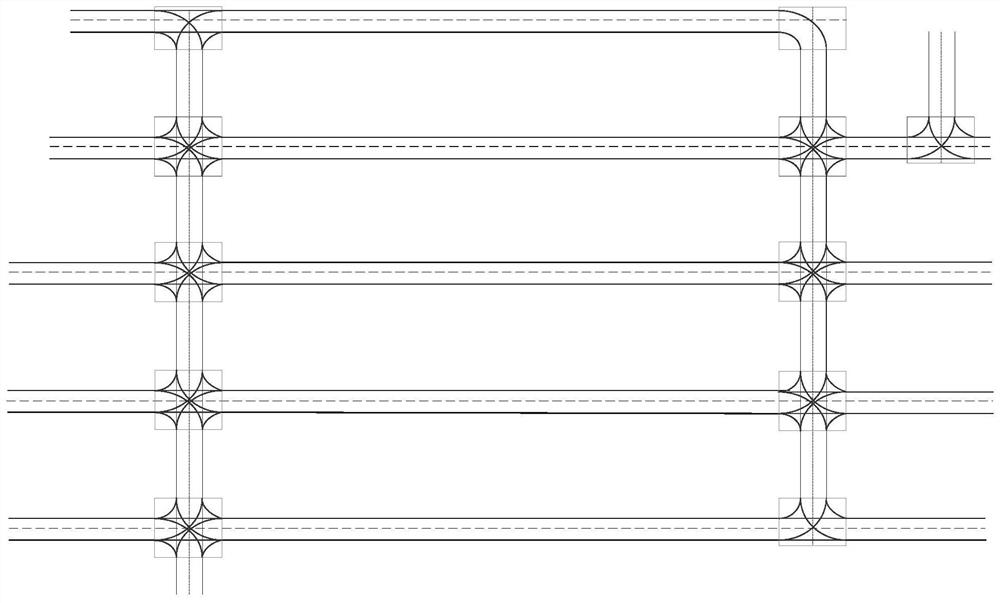
[0058] The idea of the present invention is: firstly establish a geometric model according to the constraints of vehicle corners, construct a high-precision electronic map of a specified area, and then use the Floyd algorithm to calculate the global distance matrix and the optimal path matrix in the area, and then use the A* algorithm to recursively obtain The optimal path ensures the optimal solution of the path while increasing the algorithm iteration speed to complete the global path planning; finally, according to the self-designed collision judgment rules and traffic judgment rules, the online planning of the driving reference path and the dynamic global obstacle avoidance of the self-driving vehicle are realized.
[0059] Such as figure 1 As shown, a hybrid path ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More