Miniature design for exoskeleton robot joint motor
A technology of exoskeleton robots and joints, which is applied in the direction of manipulators, program-controlled manipulators, joints, etc., can solve the problems of drive control robot displacement movement hysteresis, large current loss, and complex structure, and achieve compact motor footprint and reduce current consumption. , the effect of simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
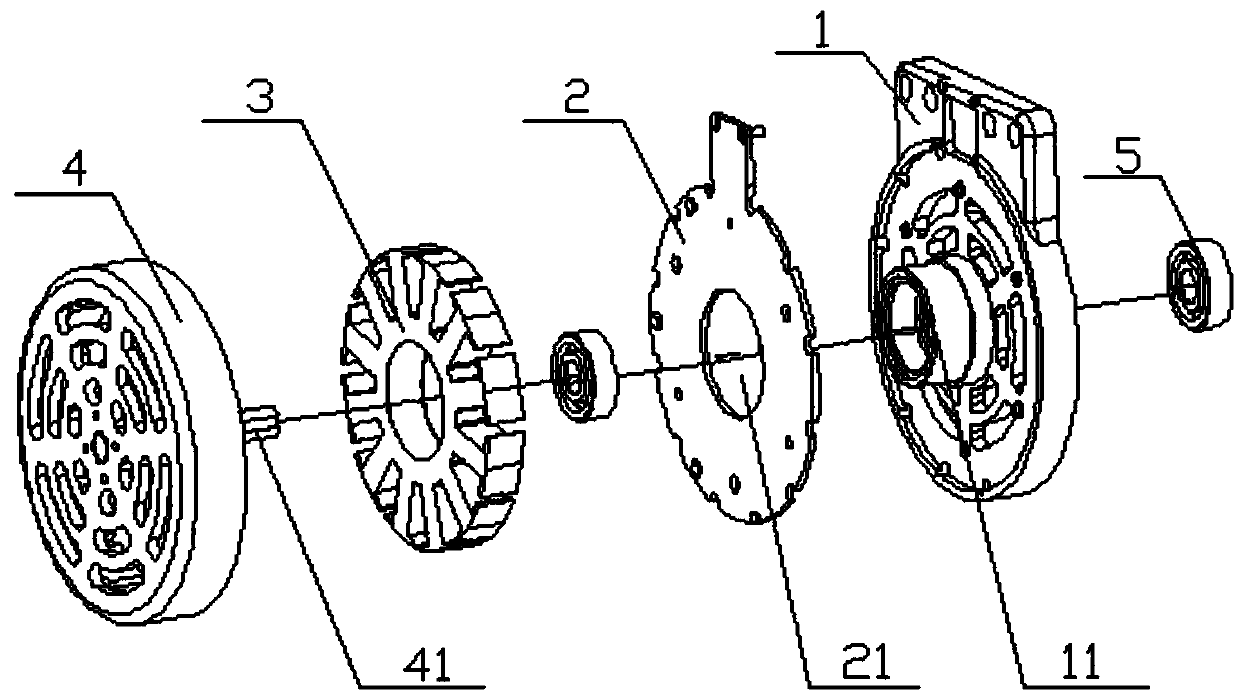
[0013] see figure 1 , the miniaturized design of the joint motor of the exoskeleton robot of the present invention includes a stator bracket 1, a stator chip 3, a rotor bracket 4, and a circuit board 2. The stator bracket 1 is provided with a raised rotating shaft mounting portion 11 and a number of stators, stator brackets 1. A circuit board 2 is fixedly installed on one side. The circuit board 2 is provided with a circular hole 21 and a number of stator through holes. The stator core 3 is provided with a number of stator card slots and shaft through holes. The rotating shaft 41 and a number of rotors, the rotating shaft 41 passes through the stator chip 3 and the circuit board 2 and is fitted in the rotating shaft mounting part 11 . Rolling bearing 5, the stator bracket 4 and the circuit board 2 are fixedly connected with a number of screws, the stator on the stator bracket 1 is inserted into the stator slot on the stator chip 3 through the stator through hole on the circuit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



