

Robot wrist assembly debugging device
A robot and wrist technology, applied in the field of robot wrist assembly and debugging device, can solve the problems of low measurement efficiency, unsuitable for large-load robots, and reduced assembly accuracy, and achieve accurate and reliable measurement data, good assembly effect, and improved production efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The principles and features of the present invention are described below in conjunction with the accompanying drawings, and the examples given are only used to explain the present invention, and are not intended to limit the scope of the present invention.
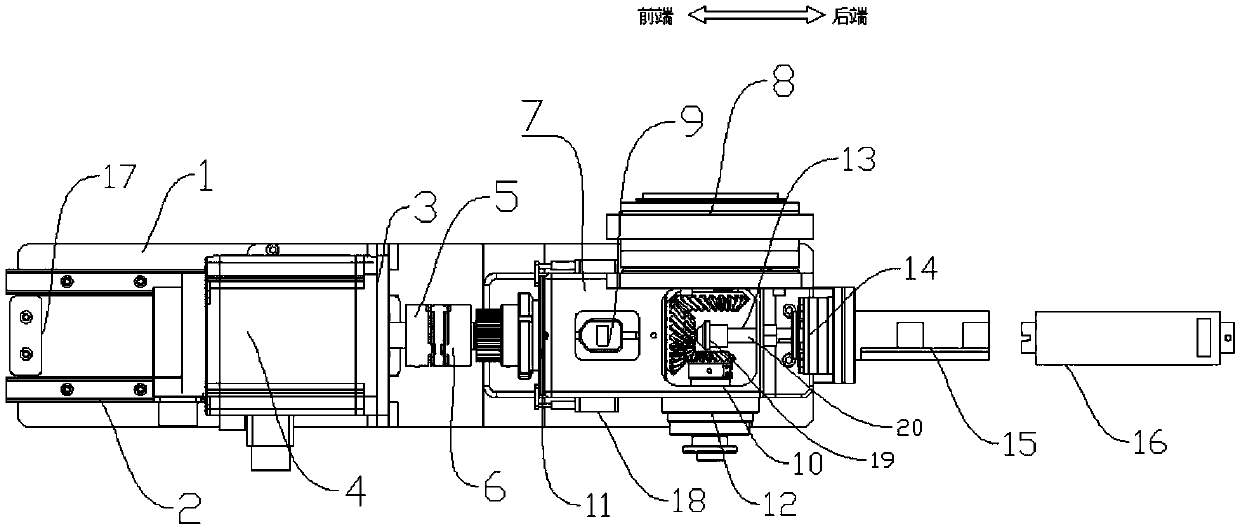
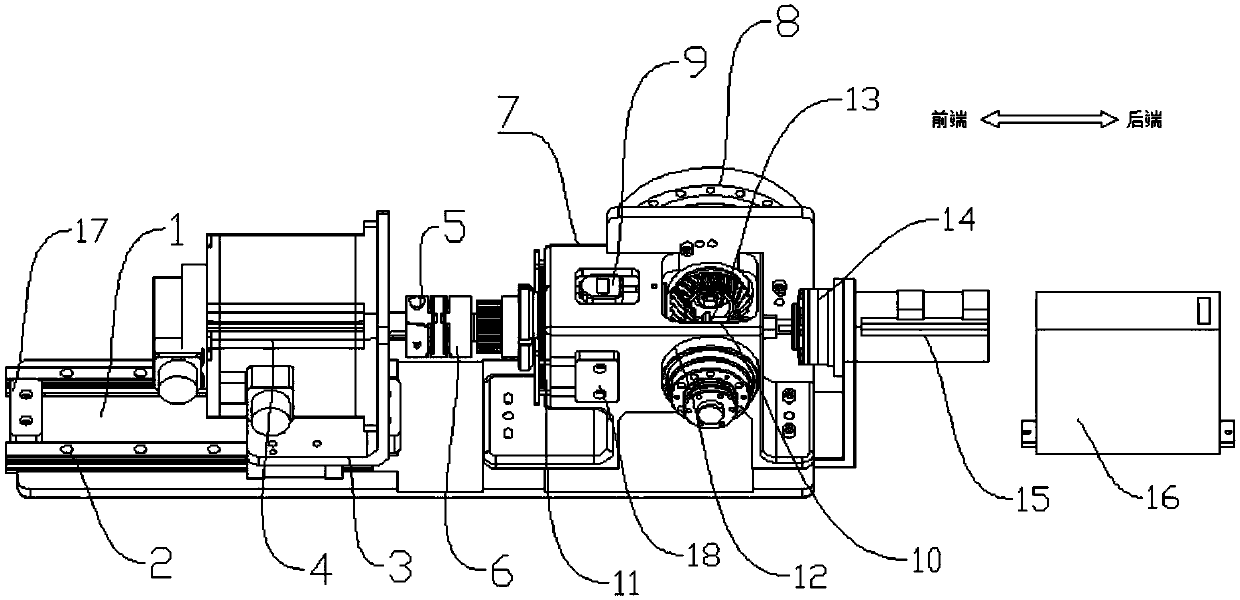
[0028] Such as figure 1 As shown, a robot wrist assembly and debugging device includes a mounting substrate 1, a high-precision guide rail 2, a motor mounting plate 3, a driving motor 4, a transmission component, a component bracket 7, a first reducer 8, a displacement sensor 9, and a displacement adjustment thimble 13. The driving device, wherein,
[0029] The high-precision guide rail 2 is fixedly installed on the front end of the installation substrate 1, the driving motor 4 is movably installed on the high-precision guide rail 2 through the motor mounting plate 3, and the driving motor 4 is connected with the transmission Component transmission connection, the drive motor 4 slides on the high-precision guide ra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More