

Charging control method and system for multiple AGV trolleys
A charging control method and charging control technology, applied in the field of AGV, can solve the problems of fast work rhythm and low work efficiency, and achieve the effect of improving work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
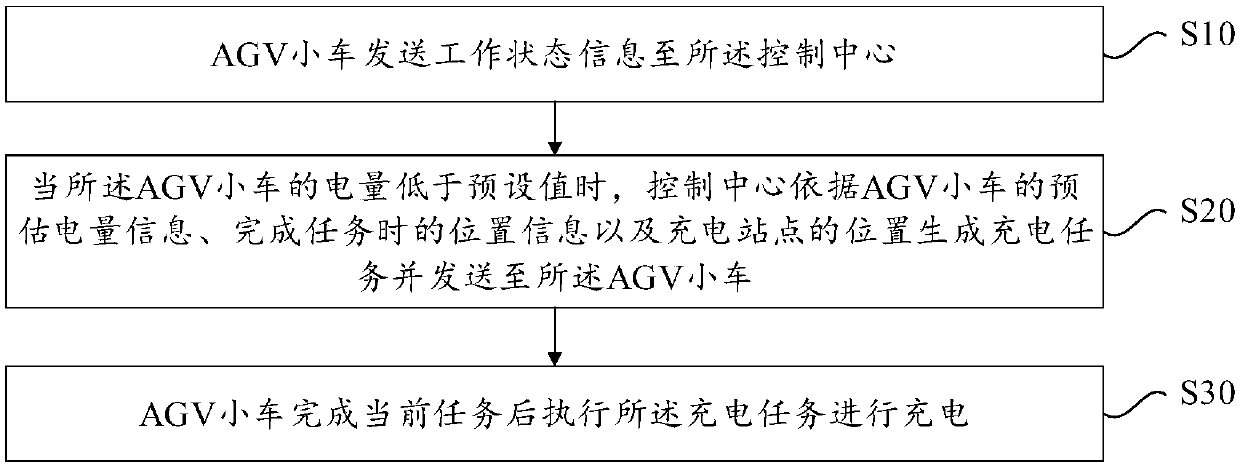
[0044] See figure 1 This embodiment provides a multi-AGV car charging control method. The multi-AGV car charging control method is applied to a multi-AGV car charging control system 100. The multi-AGV car charging control includes a control center 110 and a plurality of AGV cars 120 , The charging control method of the multi-AGV trolley includes the following steps.
[0045] Step S10: The AGV trolley 120 sends working status information to the control center 110.
[0046] During the execution of the work task, the AGV trolley 120 sends work status information to the control center 110 at preset time intervals. The working status information includes information about the transportation task currently performed by the AGV trolley 120, current position information, power information, and the like of the AGV trolley 120. The transportation task information includes the cargo information transported by the AGV trolley 120, the location of the transportation starting point, and the loc...
no. 2 example
[0075] This embodiment provides a multi-AGV trolley charging control system 100. The multi-AGV trolley charging control system 100 can be used to execute the multi-AGV trolley charging control method provided by the first embodiment.
[0076] It should be noted that the basic principles and technical effects of the multi-AGV trolley charging control system 100 provided in this embodiment are basically the same as the multi-AGV trolley charging control method provided in the first embodiment. For a brief description, this embodiment will not be repeated. For detailed description, this embodiment does not introduce details, please refer to the related content in the first embodiment.
[0077] See Figure 4 The multi-AGV trolley charging control system 100 includes a control center 110 and multiple AGV trolleys 120, and the multiple AGV trolleys 120 are in communication connection with the control center 110.
[0078] The AGV trolley 120 is used to send work status information to the c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More