Method and system for suppressing hysteresis characteristics of piezoelectric actuator and medium
A technology of piezoelectric ceramics and actuators, which is applied in the field of suppression of hysteresis characteristics of piezoelectric ceramic actuators, can solve the problems of too many parameters for hysteresis model identification, general suppression effect of hysteresis characteristics, and insufficient fitting degree of hysteresis characteristics. Less process, high fitting degree, avoiding the effect of precise positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
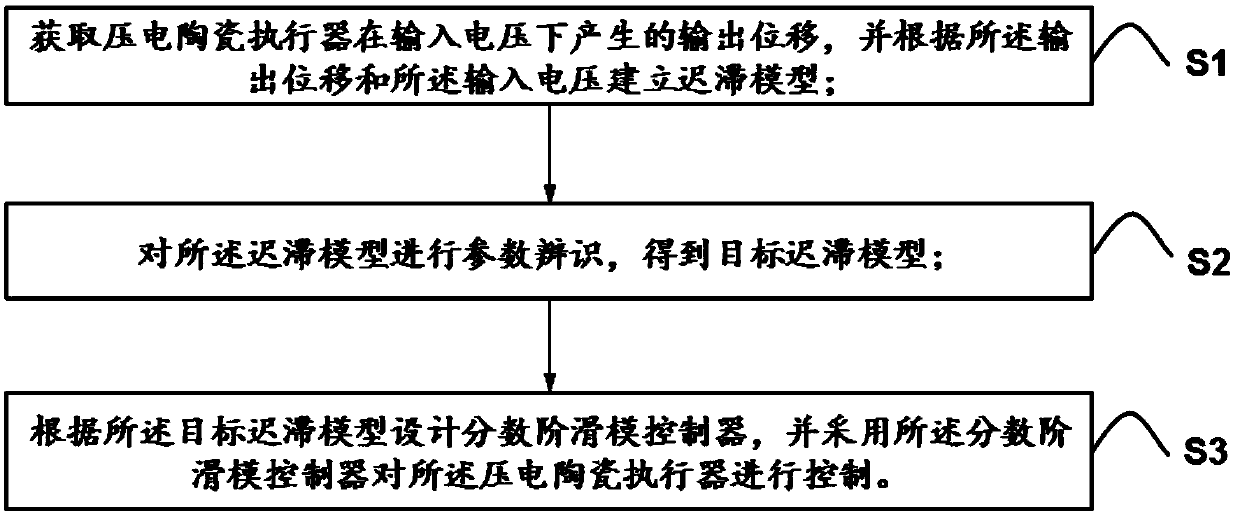
[0080] Embodiment one, as figure 1 As shown, a method for suppressing hysteresis characteristics of piezoelectric ceramic actuators includes the following steps:
[0081]S1: Obtain the output displacement generated by the piezoelectric ceramic actuator under the input voltage, and establish a hysteresis model according to the output displacement and the input voltage;
[0082] S2: Perform parameter identification on the hysteresis model to obtain a target hysteresis model;
[0083] S3: Design a fractional-order sliding mode controller according to the target hysteresis model, and use the fractional-order sliding mode controller to control the piezoelectric ceramic actuator.
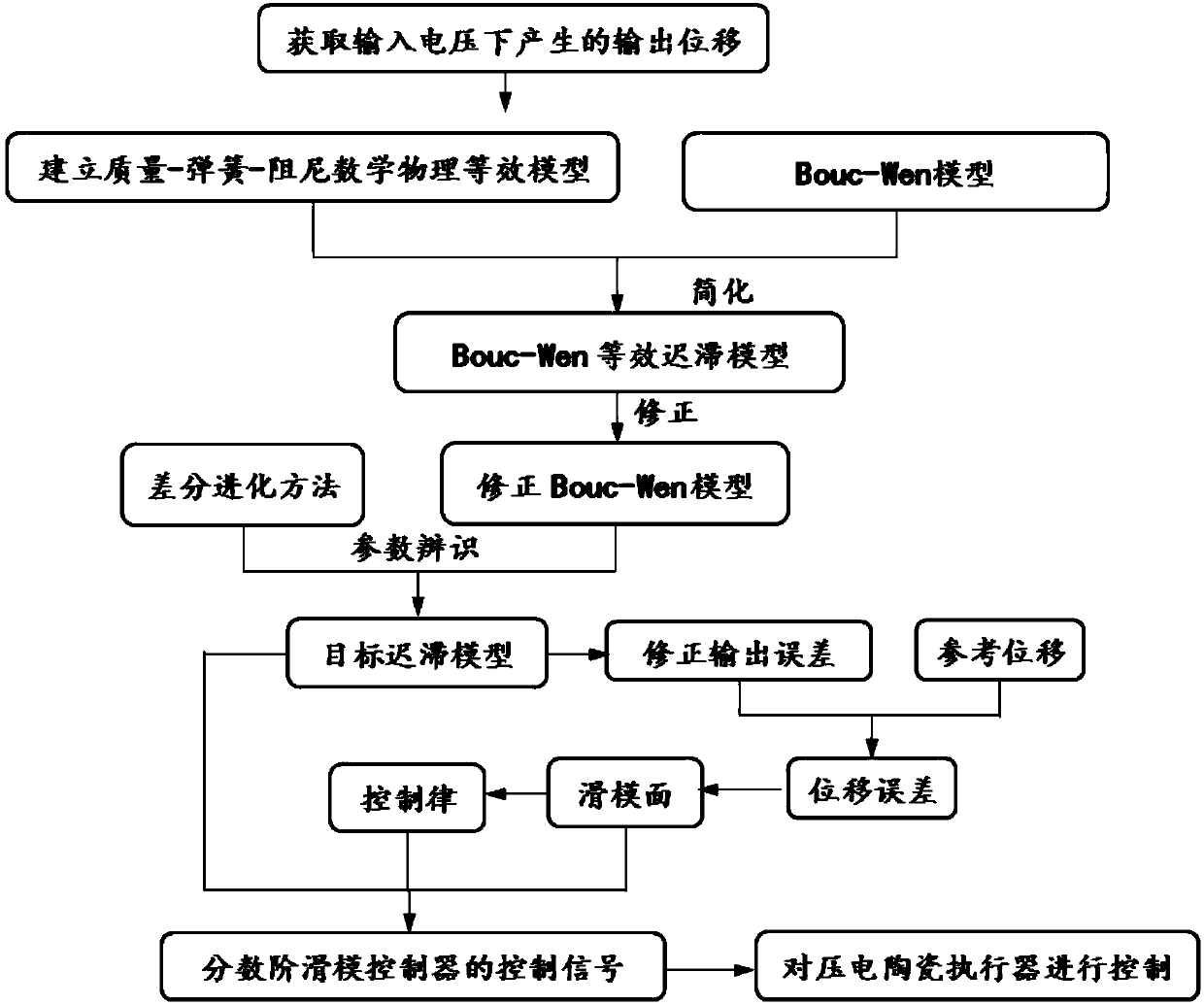
[0084] Since the hysteresis characteristic of the piezoelectric ceramic actuator is directly reflected in the output displacement under the input voltage, the hysteresis model is established through the output displacement and the input voltage, and the hysteresis characteristic is described by the relat...
Embodiment 2
[0150] Embodiment two, such as Figure 10 As shown, a piezoelectric ceramic actuator hysteresis suppression system includes a power supply module, a sampling module, a processing module and a control module;
[0151] The power module is used to provide the input voltage of the piezoelectric ceramic actuator;
[0152] The sampling module is used to obtain the output displacement generated by the piezoelectric ceramic actuator under the input voltage;
[0153] The processing module is used to establish a hysteresis model according to the output displacement and the input voltage, and is also used to perform parameter identification on the hysteresis model to obtain a target hysteresis model, and is also used to design a fractional slippery slope according to the target hysteresis model. Modular controller;
[0154] The control module is used to control the piezoelectric ceramic actuator by using the fractional order sliding mode controller.
[0155] In this embodiment, the po...
Embodiment 3
[0158] Embodiment 3. Based on Embodiment 1 and Embodiment 2, this embodiment also discloses a suppression system for hysteresis characteristics of piezoelectric ceramic actuators, including a processor, a memory, and a A computer program on a processor, when said computer program runs, it realizes as figure 1 The following steps are shown:
[0159] S1: Obtain the output displacement generated by the piezoelectric ceramic actuator under the input voltage, and establish a hysteresis model according to the output displacement and the input voltage;
[0160] S2: Perform parameter identification on the hysteresis model to obtain a target hysteresis model;
[0161] S3: Design a fractional-order sliding mode controller according to the target hysteresis model, and use the fractional-order sliding mode controller to control the piezoelectric ceramic actuator.
[0162] By storing the computer program on the memory and running it on the processor, the suppression system of the hystere...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com