

Submerged mobile grasping service robot system
A service robot, immersive technology, applied in the field of service robots, can solve the problems of spending a lot of time and energy, difficult to see the world, difficult to have, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with specific examples, but is not limited thereto.
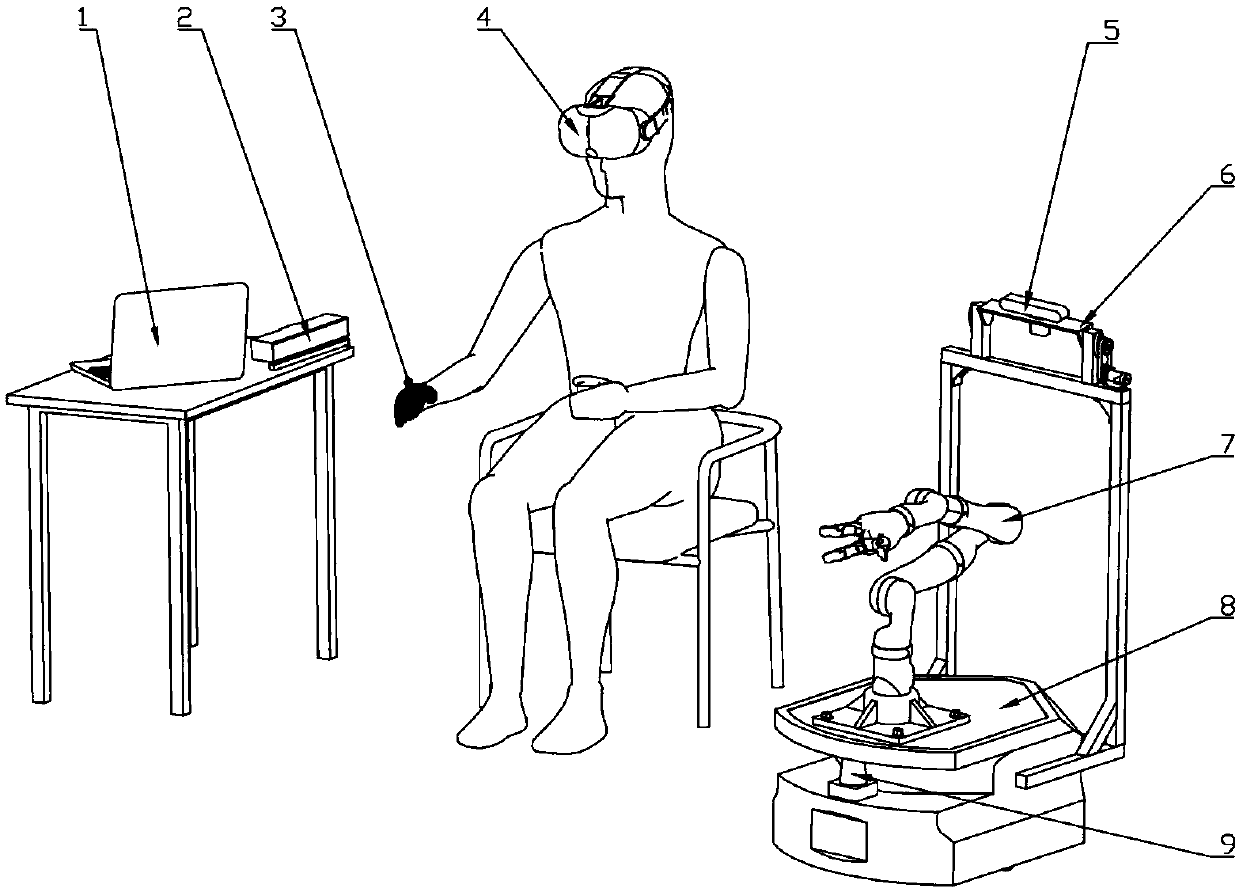
[0031] like figure 1 As shown, an immersive mobile grabbing service robot system includes a user operation terminal and a mobile execution terminal. The user operation terminal includes a host computer control center 1, a user terminal visual sensor 2, a position tracking glove 3, and a head display 4. The mobile execution end includes a mobile end visual sensor 5 , a two-axis gimbal 6 , a lightweight bionic robot arm 7 , a mobile platform 8 and a laser radar sensor 9 .
[0032] The upper computer control center 1 is used for the communication, control and data processing of the lightweight bionic manipulator 7, the mobile platform 8, the head display 4, the visual sensor 2 of the user terminal and the visual sensor 5 of the mobile terminal, so as to realize the communication of external information. To integrate and control the system to run accur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More