Method for calculating fan rotating speed of robot
A calculation method and a technology for fan speed, applied in the field of climbing equipment, can solve the problems of poor adaptability of the tree surface and inflexible fixation around the trunk.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
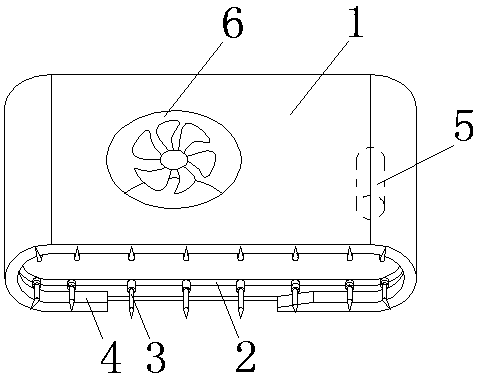
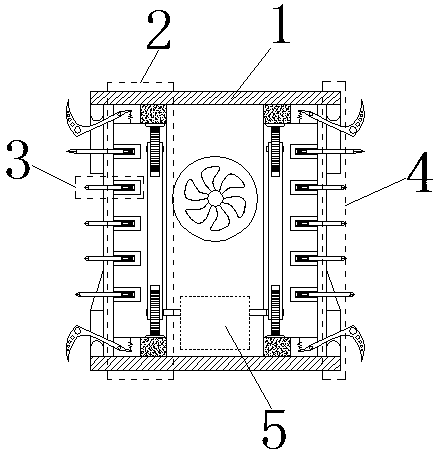
[0099] A kind of tree-climbing robot disclosed in this embodiment combines figure 1 with figure 2 As shown, it includes a housing 1, a transmission belt 2, a tree climbing claw 3, a limit ring 4, a transmission belt driving member 5 and a pressure member 6. The housing 1 includes: a bottom surface in contact with the tree body surface, and a top surface opposite to the bottom surface , two sides parallel to the axis of the tree body on both sides of the bottom surface, a cavity for accommodating the internal structure is provided between the two sides of the housing 1, and a transmission belt 2 is arranged in the cavity, and the transmission belt 2 runs along the tree body. The axial direction is arranged, and the transmission belt 2 is driven to rotate through the transmission belt driver 5 inside the cavity, and several tree climbing claws 3 are arranged on both sides of the transmission belt 2, and several tree climbing claws 3 are arranged at equal intervals along the tra...
specific Embodiment approach 2
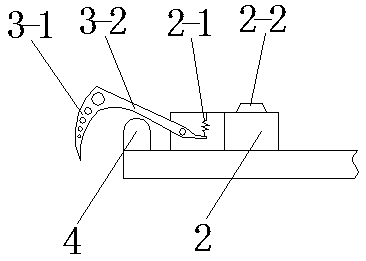
[0107] This embodiment is based on the specific implementation mode 1, specifically, in combination with image 3 As shown, the claw body 3-1 of the tree-climbing claw 3 is arc-shaped, and the center of the arc-shaped circle falls on the hinge shaft where the tree-climbing claw 3 and the transmission belt 2 are hinged;
[0108] It is convenient for the tip of the claw body 3-1 to penetrate into the tree body for fixing.
specific Embodiment approach 3
[0109] This embodiment is based on the specific implementation mode 1 or 2, specifically, in combination with Figure 5 As shown, the transmission belt driver 5 includes: a driving motor 5-1, a driving wheel 5-2, a frame body 5-3 and a driven wheel 5-4, the transmission belt 2 is sleeved outside the frame body 5-3, and the frame body The body 5-3 provides support for the transmission belt 2, and the two ends of the frame body 5-3 are respectively provided with a driving wheel 5-2 and a driven wheel 5-4, and the driving wheel 5-2 and the driven wheel 5-4 are connected with the synchronous teeth. 2-2 meshing, the driving wheel 5-2 is connected with the drive motor 5-1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com