Adaptive cylinder gripping claw
A self-adaptive, cylindrical technology, applied in the field of manipulators, can solve the problems of reducing work efficiency, the grasping object cannot be automatically centered, the arm has no centering mechanism, etc., to prevent the object from slipping.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to make the technical problems, technical solutions and advantages to be solved by the present invention clearer, the following will describe in detail with reference to the drawings and specific embodiments.
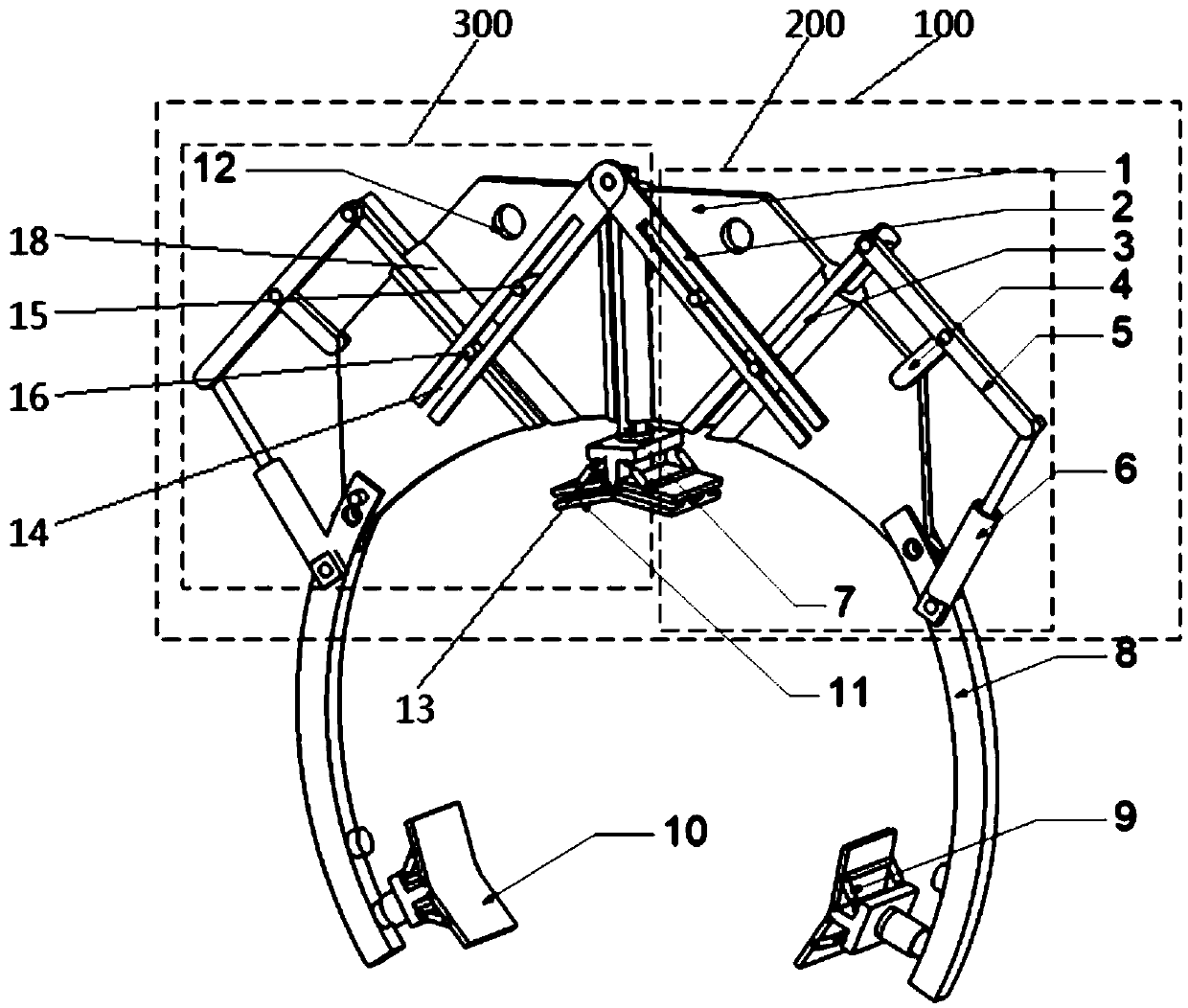
[0025] An embodiment of the present invention provides an adaptive cylinder grasping gripper, such as figure 1 As shown, it includes a frame 1 and claws 8 symmetrically distributed on both sides of the frame 1. The two claws 8 are connected to the frame 1 through a symmetrical adaptive deformation mechanism 100, wherein:
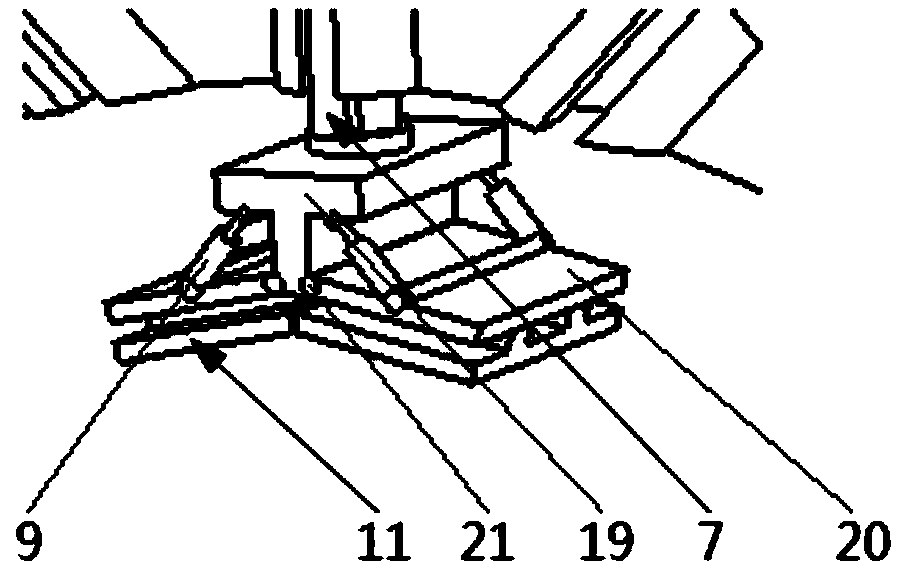
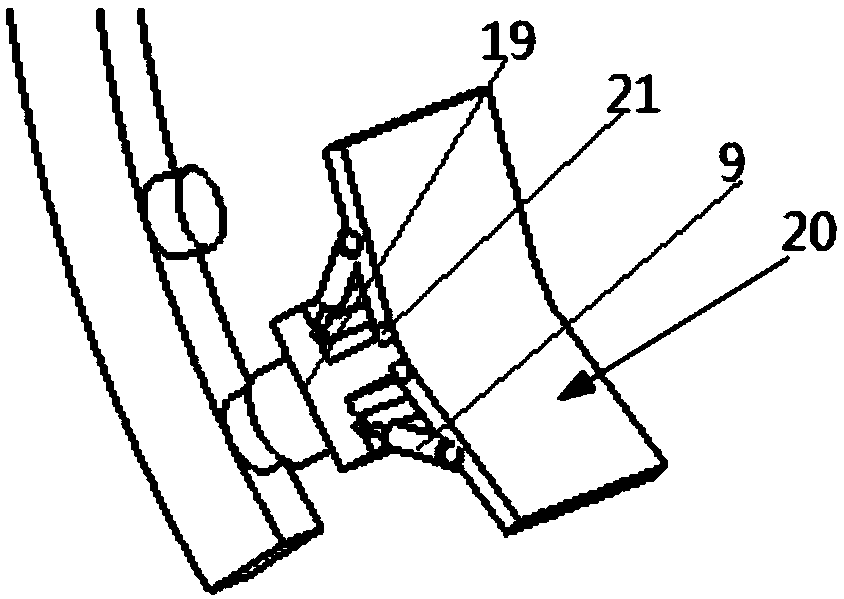
[0026] The adaptive deformation mechanism 100 includes a middle slider 7 and a link mechanism 200 symmetrically connected to both sides of the middle slider 7 and connected to the claws 8 on both sides, and the middle slider 7 is connected to the link mechanism 200 and the claws on one side. 8 to form three four-bar mechanisms 300 connected in series, the middle slider 7 is provided with a middle clamping block 13, and the claws 8 on b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More