Synchronous walking control device and method for multiple tower wagons
A walking control and tower truck technology, applied in the field of agricultural machinery navigation, can solve problems such as the inability to fully meet precise sprinkler irrigation, the control coordination needs to be improved, and the inability to perform self-correction, so as to improve timeliness, maximize efficiency, and reduce mutual influence. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
[0024] Descriptions of structural embodiments and methods of the invention are disclosed herein. It should be understood that there is no intention to limit the invention to the particular disclosed embodiments, and that the invention can be practiced using other features, elements, methods and embodiments. Similar elements in different embodiments are generally labeled with similar numbers.
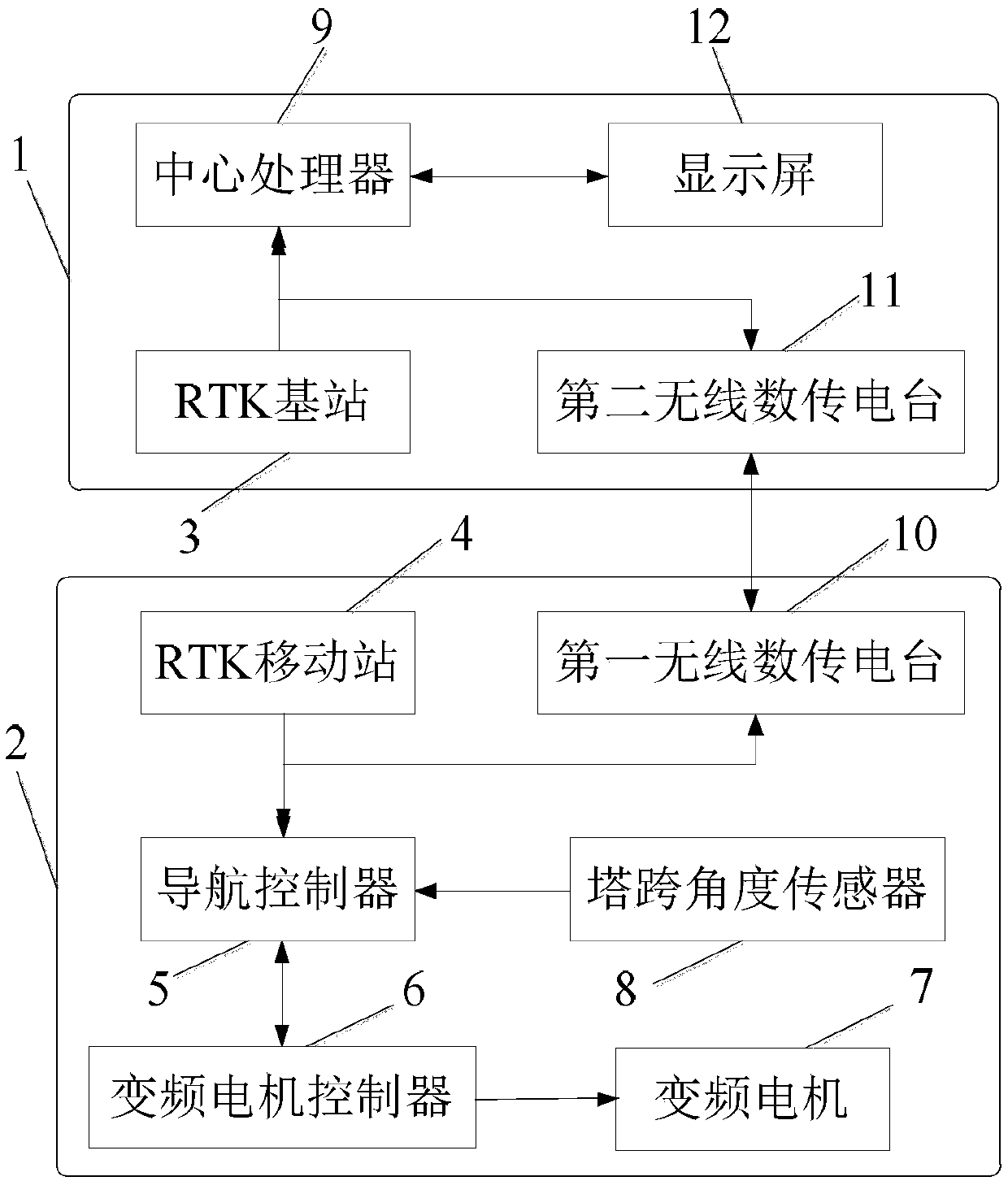
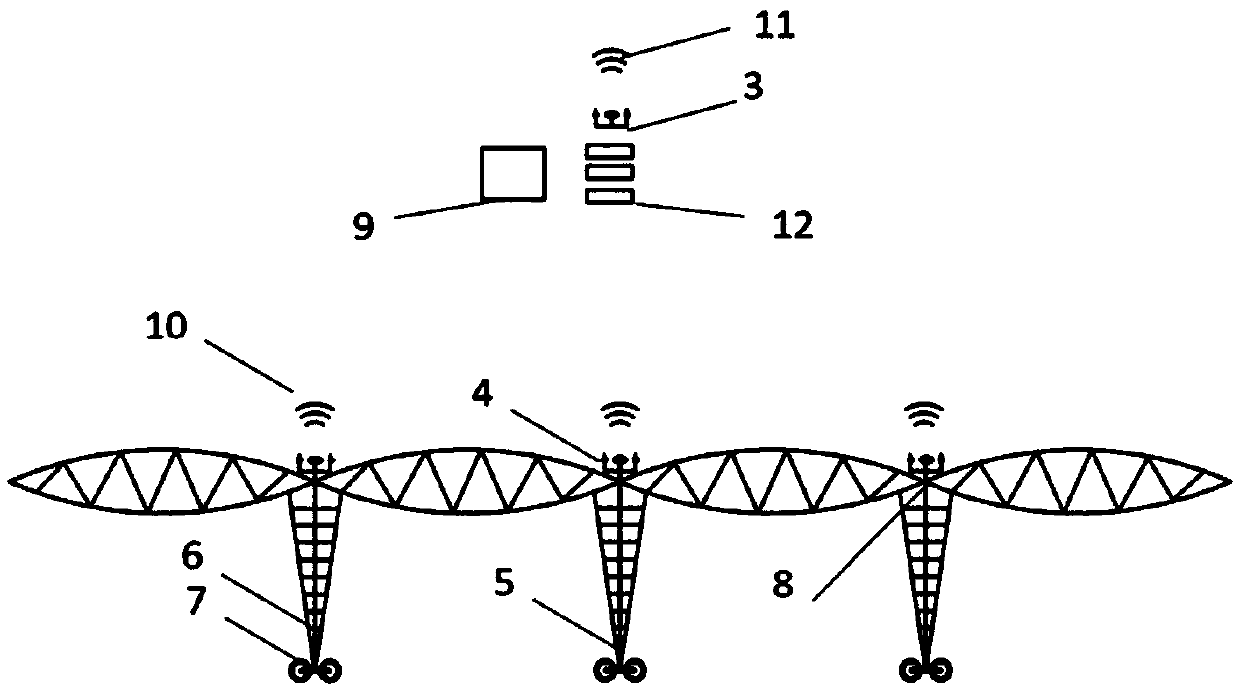
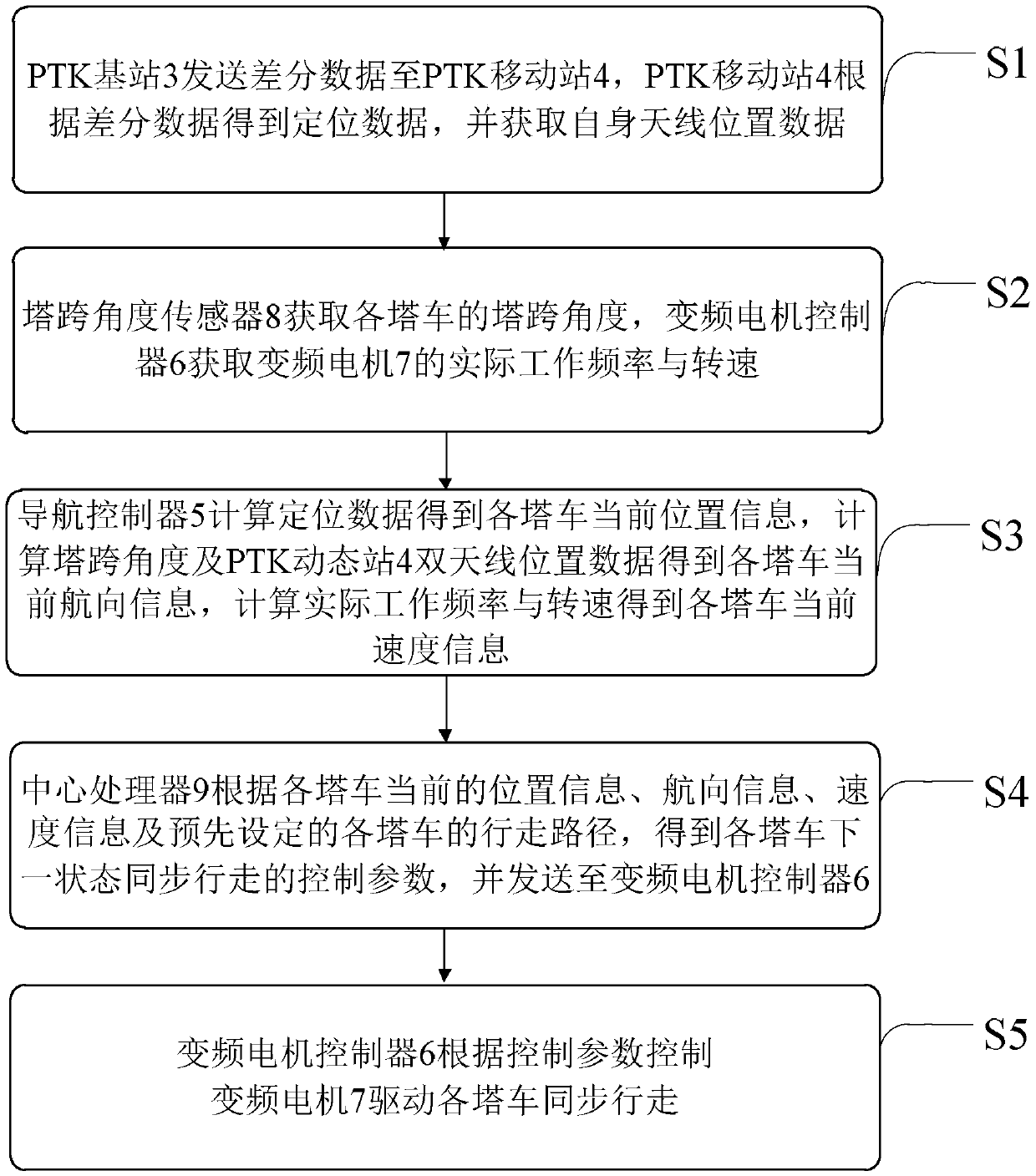
[0025] An embodiment of the present invention proposes a multi-tower vehicle synchronous travel control device, which is used to control the synchronous travel of multiple tower vehicles of a sprinkler irrigation machine. like figure 1 and figure 2 As shown, the device includes a navigation system control unit 1 and a motion con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



