

Tendon rope driven variable rigidity soft finger and soft hand thereof
A technology of variable stiffness and soft body matrix, applied in the directions of manipulators, chucks, manufacturing tools, etc., can solve the problems of low control accuracy and insufficient grasping force, and achieve the effect of improving control accuracy, simple structure and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] Below in conjunction with accompanying drawing and embodiment further introduce concrete structure, working principle content of the present invention in detail:
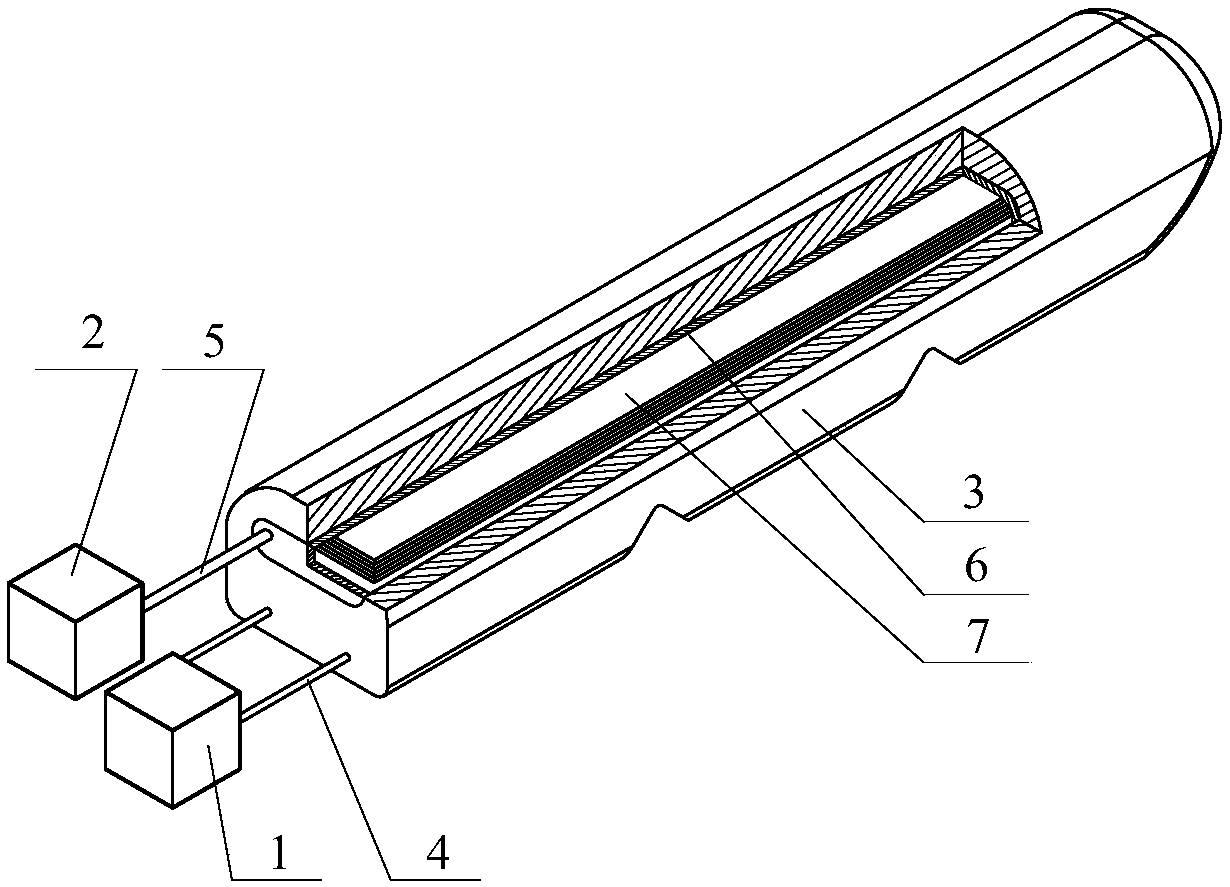
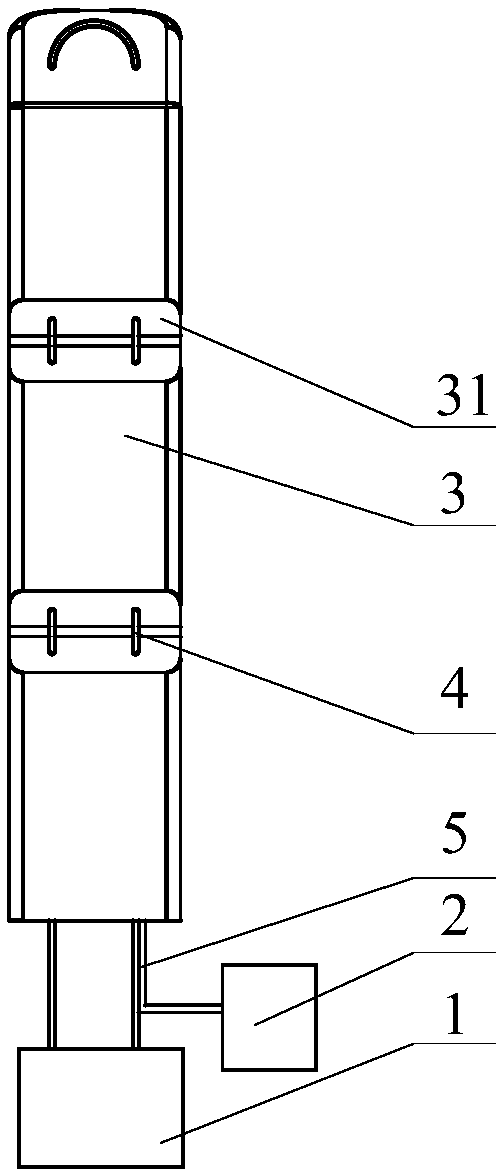
[0021] An embodiment of a soft finger with variable stiffness driven by tendon cords proposed by the present invention is as follows: figure 1 As shown, it includes an airway 5, a soft body 3 similar in shape to a finger, a tendon rope 4 inserted on the soft body 3, and a motor 1 and a negative pressure device 2 located outside the soft body 3; The airtight accommodating cavity opened in the length direction, the interior of the accommodating cavity is loaded with the stiffness adjustment medium 7 encapsulated by the soft film 6, and there is a certain deformation space between the blocking part formed by the soft film 6 and the stiffness adjusting medium 7 and the accommodating cavity, the soft The film 6 communicates with the negative pressure device 2 through the air duct 5; the soft body 3 is driven by th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More