

Path rapid generation method in intelligent driving
A technology of intelligent driving and routing, applied in road network navigators, measuring devices, instruments, etc., can solve the problem of no processing logic technology, large amount of calculation of PMM algorithm, difficulty in ensuring the smoothness of obstacle avoidance paths and selecting appropriate safety distances, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067] In order to make the content of the present invention clearer and easier to understand, the content of the present invention will be further described below in conjunction with the accompanying drawings. Of course, the present invention is not limited to this specific embodiment, and general replacements known to those skilled in the art are also covered within the protection scope of the present invention.
[0068] The following is attached figure 1The present invention will be described in further detail with specific examples. It should be noted that the drawings are all in a very simplified form, using imprecise scales, and are only used to facilitate and clearly achieve the purpose of assisting in describing the present embodiment.
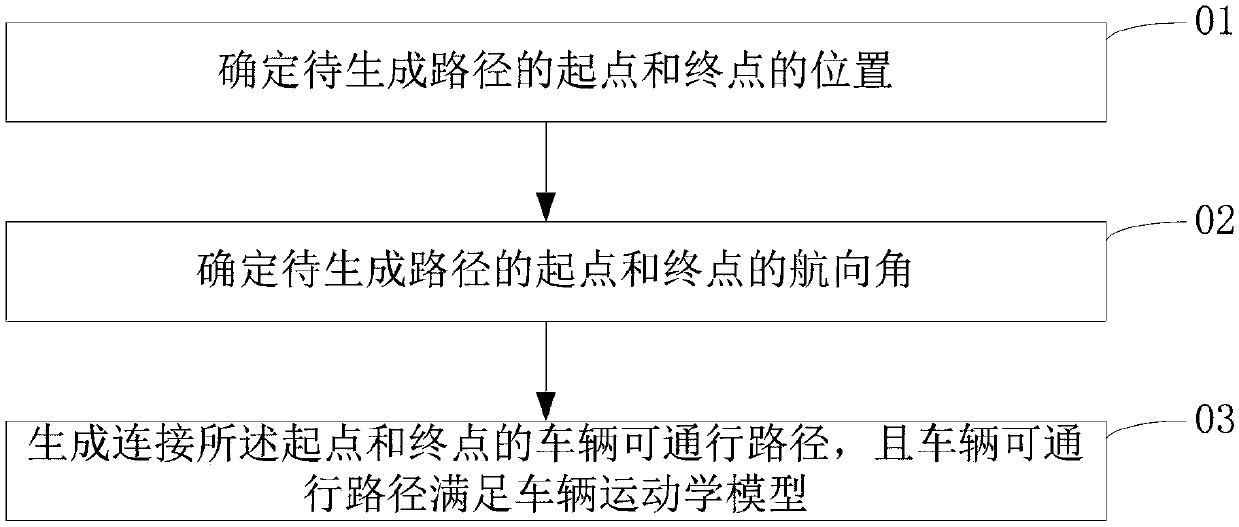
[0069] see figure 1 , in this embodiment, a method for quickly generating a path in intelligent driving, comprising:
[0070] Step 01: Determine the positions of the starting point and the ending point of the path to be generated; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More