

Dynamic feedback route planning method adopting invariant set
A path planning, dynamic feedback technology, applied in non-electric variable control, two-dimensional position/channel control, vehicle position/route/altitude control, etc., can solve the problem of unknown dynamic constraint planning safety planning, etc., to ensure safety Effects of Sexuality and Accessibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
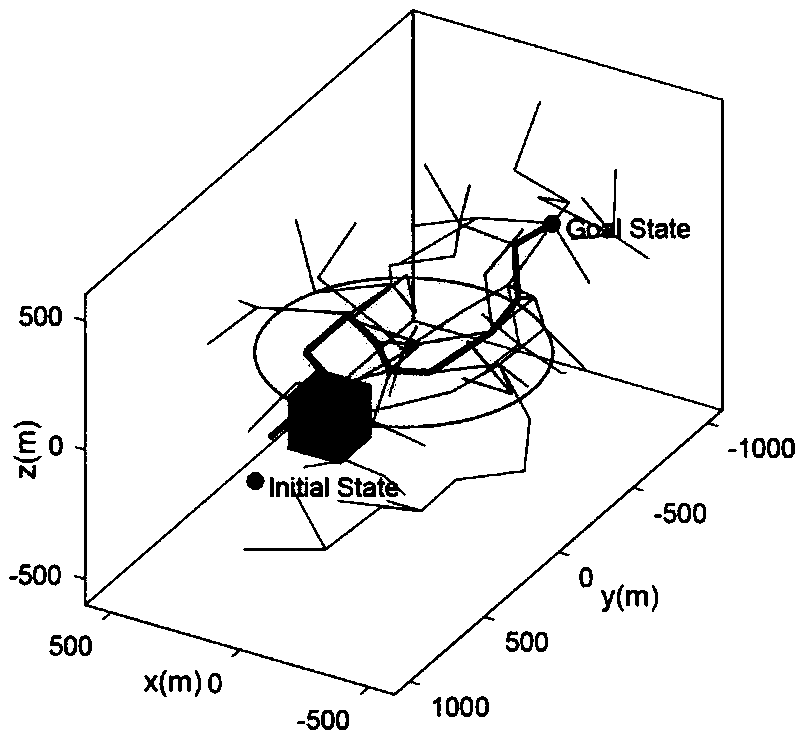
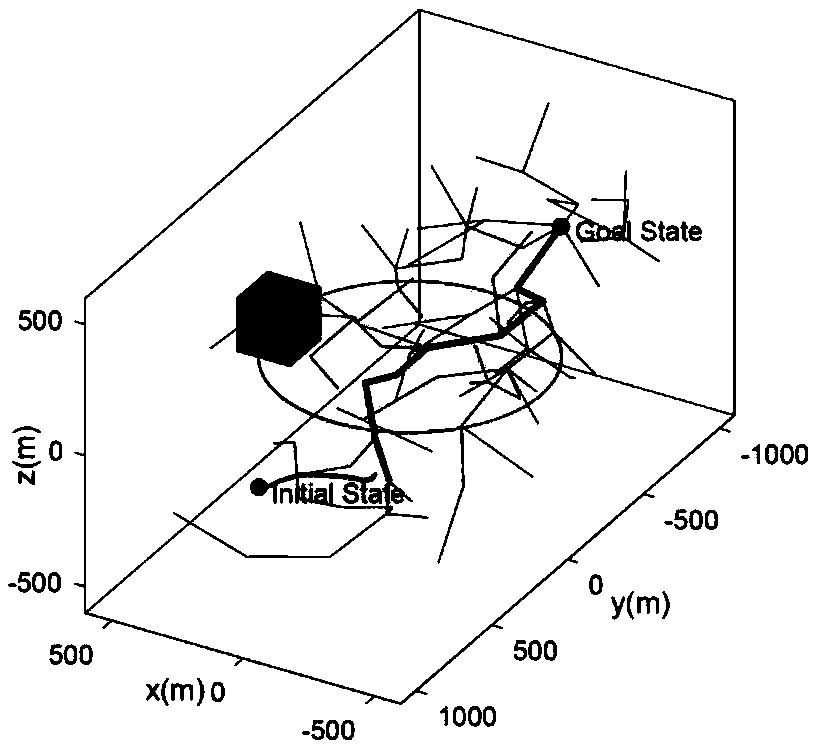
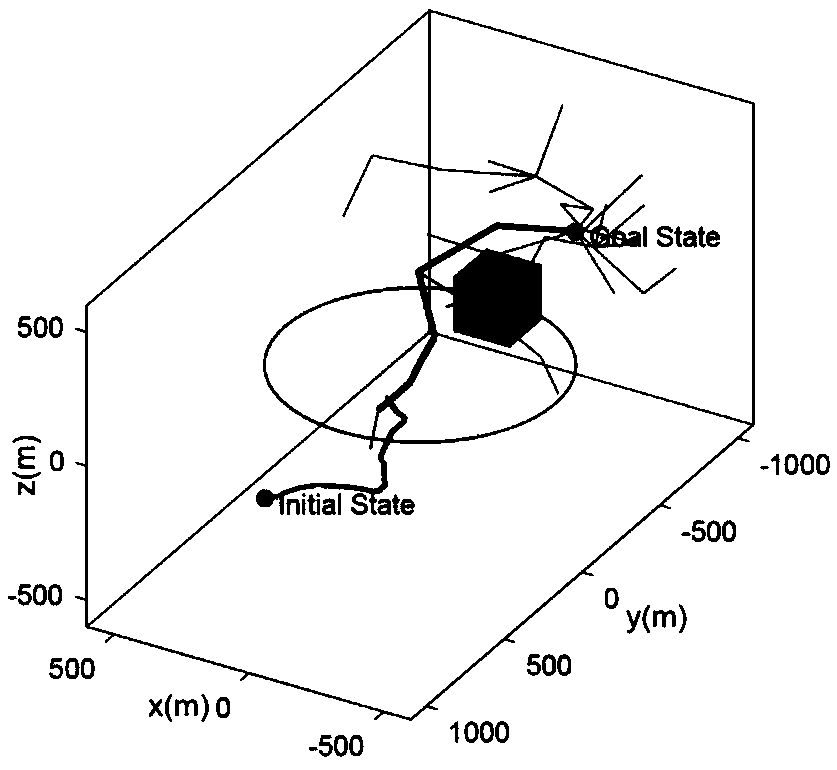
[0045] see figure 1 — Image 6 , the present invention proposes a feedback path planning algorithm using an invariant set and a dynamic asymptotically optimal search random tree (RRT*). The safe invariant set is calculated off-line, and then the random tree is established by online reverse search, and the local tree structure is corrected according to the dynamic constraints, so as to realize the dynamic obstacle avoidance feedback path planning. The implementation of this invention mainly comprises following two steps:
[0046] Step 1. According to the system state equation, design the control law and calculate the invariant set.
[0047] For state and output equations:
[0048]
[0049] in They are state vector, control input and output vector respectively. (A,B) is controllable and Control inputs and initial satisfaction constraints: Because of the presence of state constraints, the output space is non-convex, and we describe this space as the union of multiple ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More