

Distortion spherical robot for self-adaptive steering and climbing
A spherical robot and self-adaptive technology, applied in the field of robotics, can solve the problems of small climbing force and unstable turning of spherical robots, and achieve the effect of flexibly circumventing obstacles, turning smoothly, and preventing deviation from the desired path.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
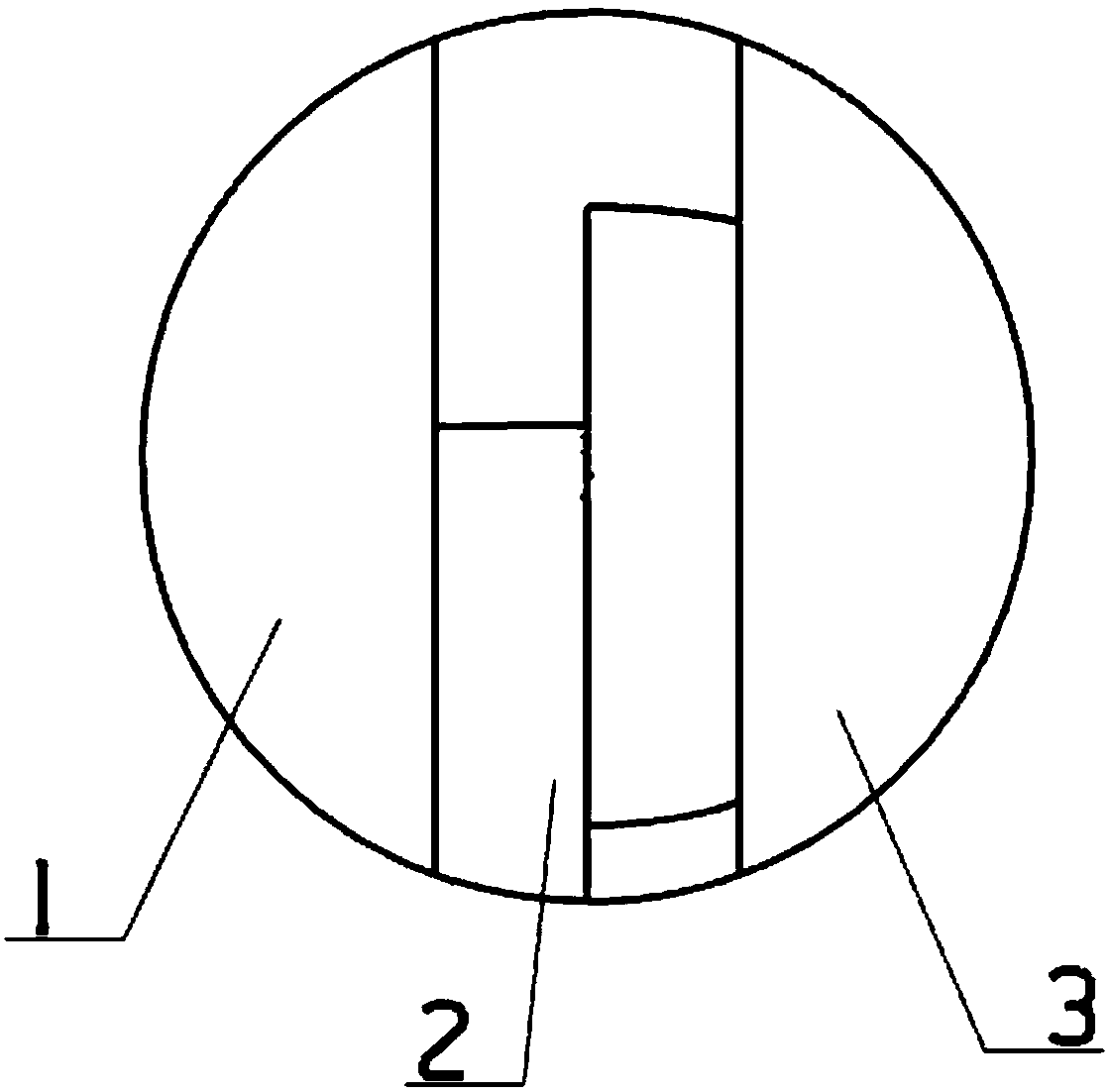
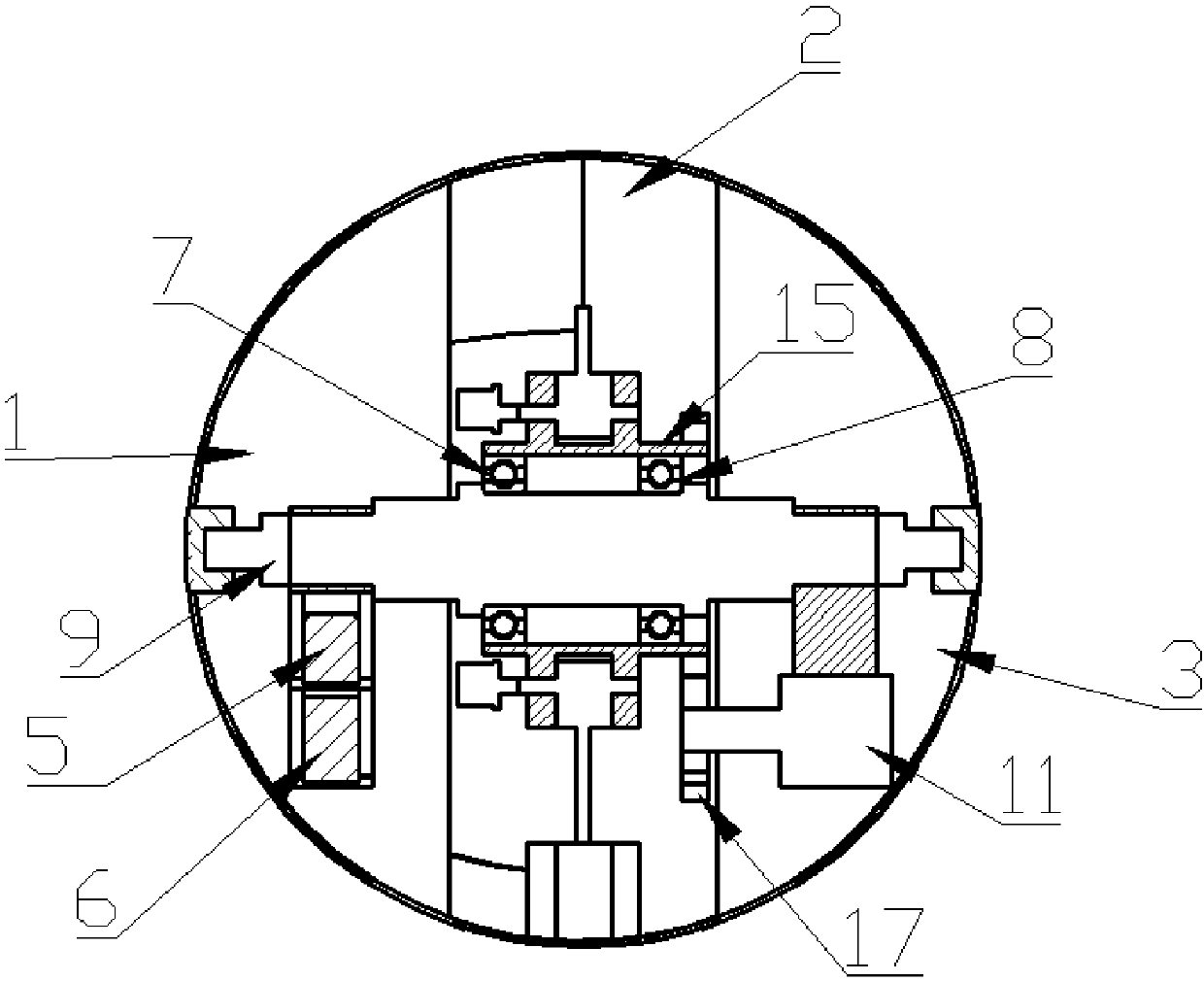
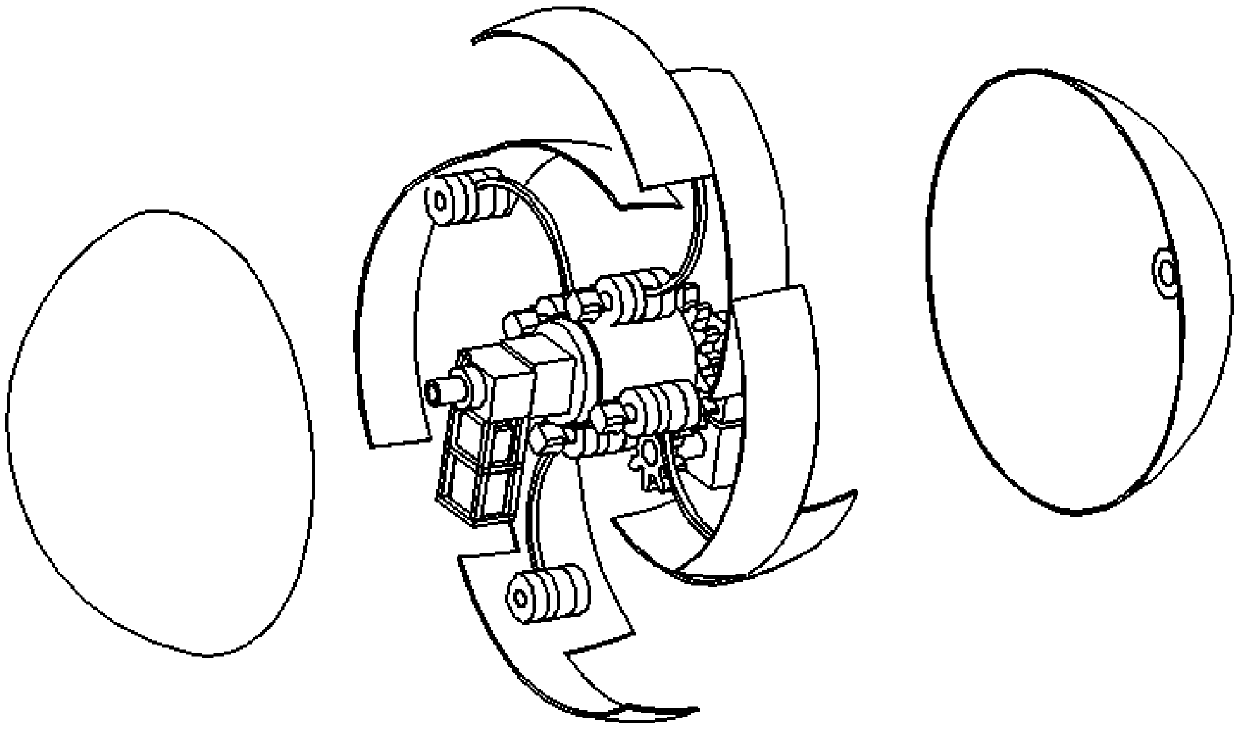
[0028] to combine Figure 1 to Figure 4 As shown, a deformed spherical robot with adaptive steering and climbing includes a left spherical shell 1, a middle spherical shell 2, and a right spherical shell 3, and a left spherical shell 1, a middle spherical shell 2, and a right spherical shell 3 Spliced together to form a complete spherical shell, the middle spherical shell 2 is equipped with a driving device, the driving device includes a motor 11, a central shaft 9 and a hollow shaft 15, the hollow shaft 15 is sleeved on the central shaft 9 and connected to it in rotation, the central shaft 9 is nested in the hollow shaft 15 through two rolling bearings (first bearing 7, second bearing 8). The motor 11 is installed on the central shaft 9 and drives the hollow shaft 15 to rotate around the central shaft 9. The output shaft of the mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More