

A two-stage braking active collision avoidance system and collision avoidance method for right-turning intelligent vehicles based on collision time
A time-to-collision, intelligent vehicle technology, applied in the direction of brakes, automatic starting devices, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
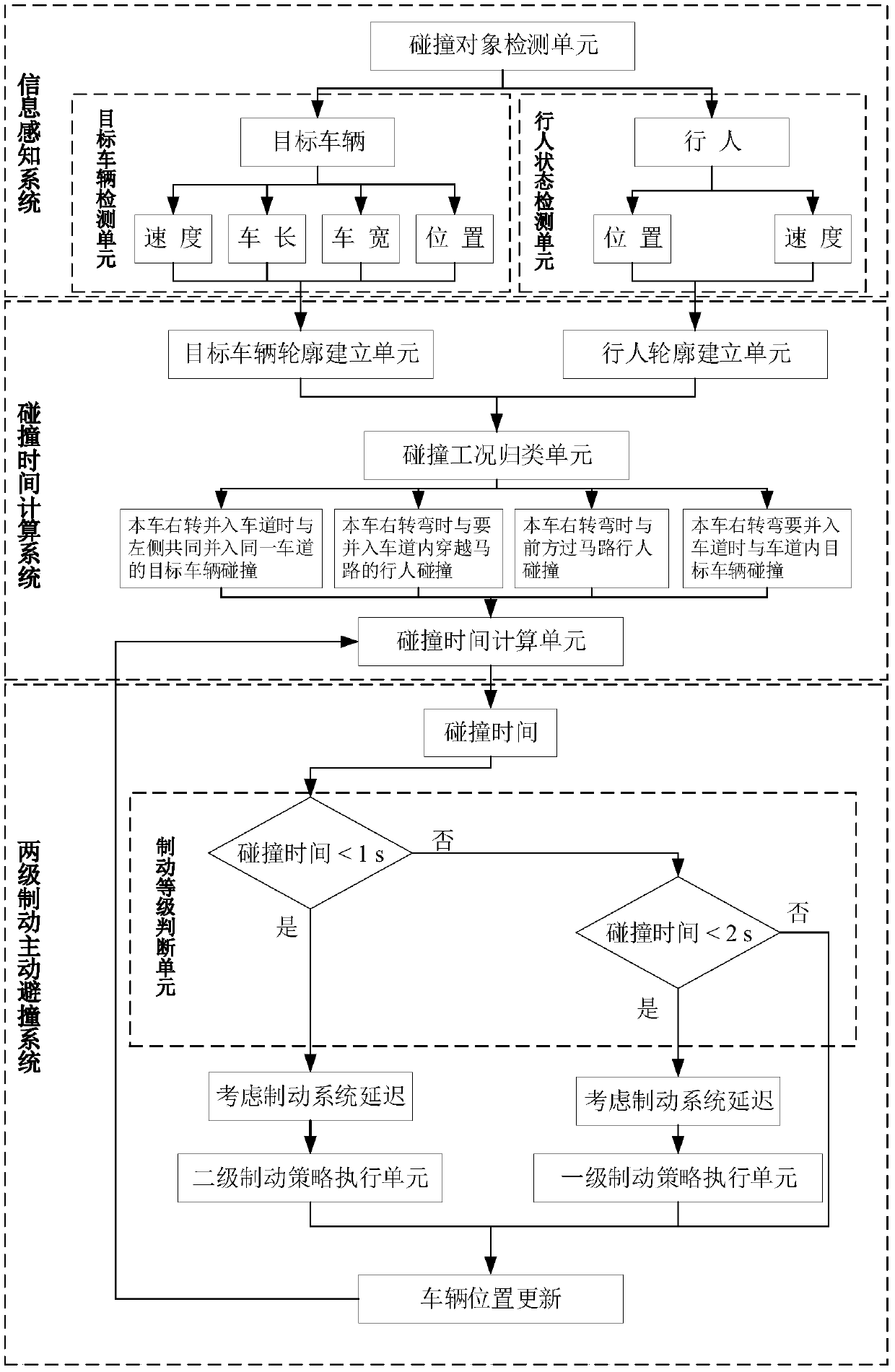
[0109] like Figure 6 As shown, in this embodiment, when the vehicle turns right and merges into the lane, it merges into the same lane with the left side of the target vehicle as an example. A two-stage braking active collision avoidance method for a right-turning intelligent vehicle includes the following steps:
[0110] Set the time interval as T, that is, calculate whether a collision occurs every T time, if the collision does not occur, continue sampling until the collision occurs, and output the time t at this time as the collision time t.
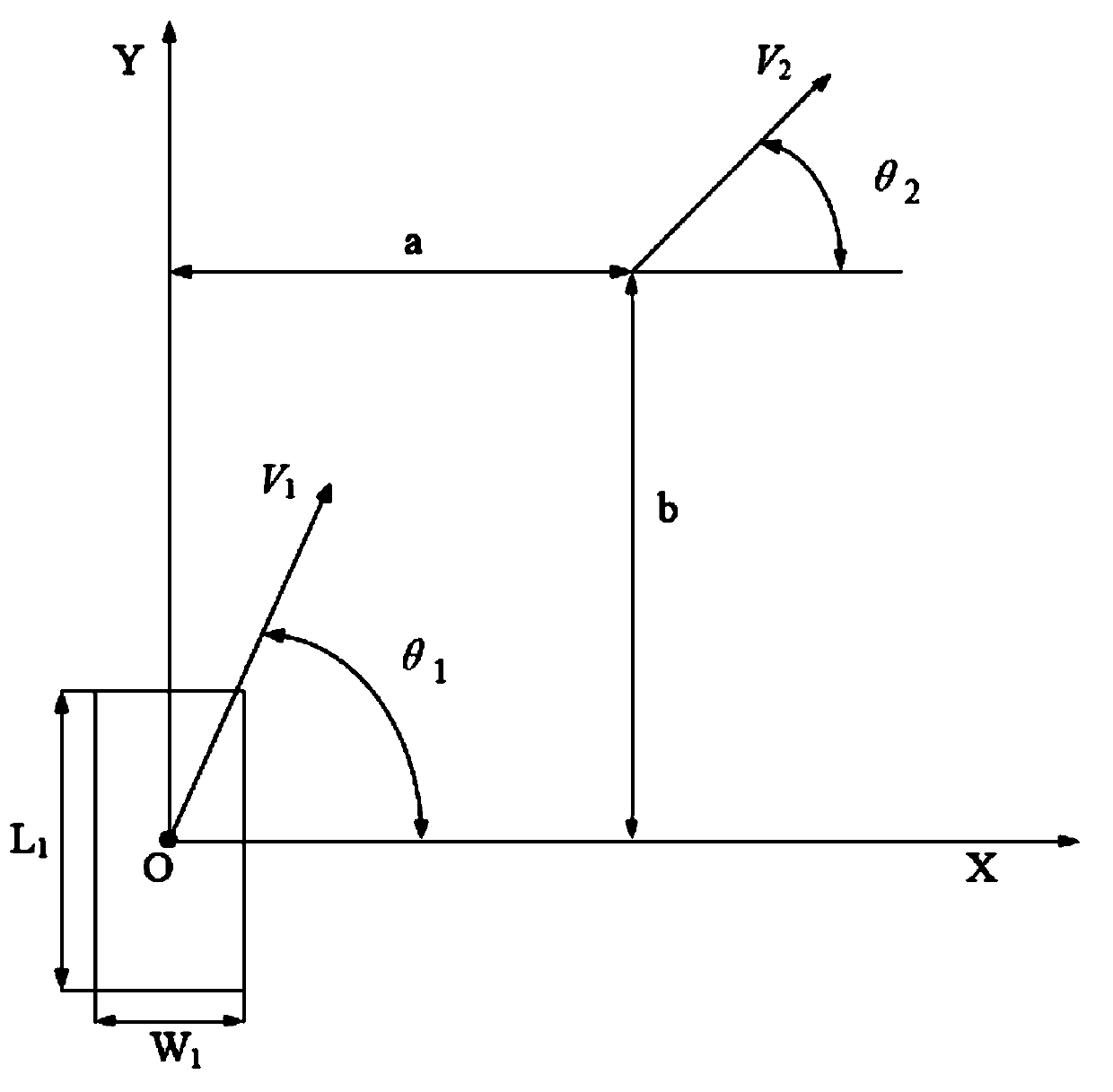
[0111] Define the vehicle speed V 1 , turning radius R, target vehicle speed V 2 , calculate the rotation angle θ through the speed of the vehicle, and the calculation method is θ=V 1 ×t×R -1 ;
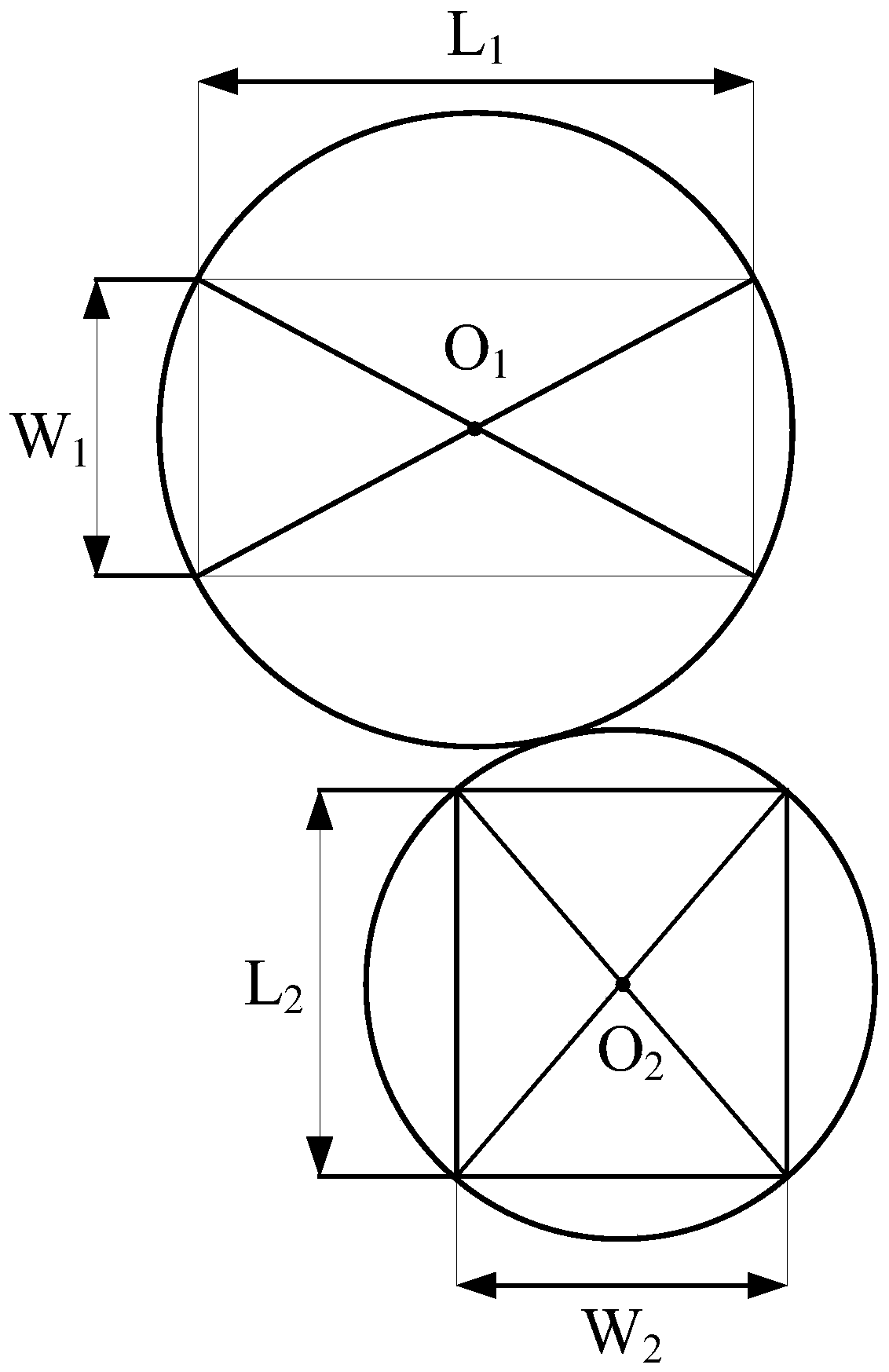
[0112] The whole process considers that the target vehicle is stationary, the position of the target vehicle is (a, b), the position coordinates of the vehicle are (x(t), y(t)), and the size of the force applied to the vehicle is V 2 , ...
Embodiment 2
[0124] like Figure 7 As shown, in this embodiment, taking the collision condition of the vehicle with a pedestrian crossing the road ahead when turning right as an example, a two-stage braking active collision avoidance method for a right-turning intelligent vehicle includes the following steps:
[0125] Set the time interval as T, that is, calculate whether a collision occurs every T time, if the collision does not occur, continue sampling until the collision occurs, and output the time t at this time as the collision time t.
[0126] Define the vehicle speed V 1 , turning radius R, pedestrian speed V 2 , calculate the rotation angle θ through the speed of the vehicle, and the calculation method is θ=V 1 ×t×R -1 ;
[0127] The whole process considers that the pedestrian is stationary, the position of the pedestrian is (a, b), the position coordinates of the vehicle are (x(t), y(t)), and the size of the force applied to the vehicle is V 2 , and the speed in the opposite ...
Embodiment 3
[0138] like Figure 8 As shown, in this embodiment, the vehicle collides with a pedestrian crossing the road when turning right and merges into the lane as an example. A two-stage braking active collision avoidance method for a right-turning intelligent vehicle includes the following steps:
[0139] Set the time interval as T, that is, calculate whether a collision occurs every T time, if the collision does not occur, continue sampling until the collision occurs, and output the time t at this time as the collision time t.
[0140] Define the vehicle speed V 1 , turning radius R, pedestrian speed V 2 , calculate the rotation angle θ through the speed of the vehicle, and the calculation method is θ=V 1 ×t×R -1 ;
[0141] The whole process considers that the pedestrian is stationary, the position of the pedestrian is (a, b), the position coordinates of the vehicle are (x(t), y(t)), and the size of the force applied to the vehicle is V 2 , and the speed in the opposite direct...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More