

Cooperative control method of upper limb exoskeleton with dynamic load compensation
A collaborative control, dynamic load technology, applied in the direction of program control manipulators, manufacturing tools, manipulators, etc., can solve the problems of increased human-machine force and excessive load weight, and achieve a wide range of adaptability and minimized human-machine force. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be described in detail below with reference to the accompanying drawings and examples.
[0023] The present invention provides an upper limb exoskeleton cooperative control method with dynamic load compensation, which specifically includes the following steps:
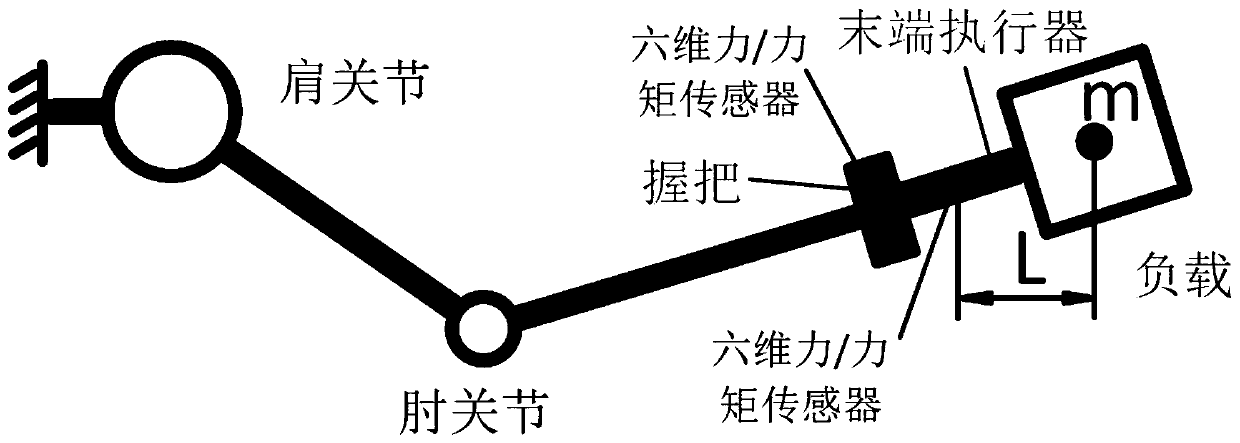
[0024] Step 1: Install an angle sensor and a six-dimensional force / torque sensor between each joint of the upper limb and the designated position to measure the angle of each joint and the generalized force in three-dimensional space.
[0025] The specific installation method is as figure 1 Shown: Install two six-dimensional force / torque sensors on the grip of the upper limb, between the elbow joint of the upper limb exoskeleton and the end effector, and install several angle sensors on the shoulder joint and elbow joint of the upper limb (the specific number depends on the structure of the upper limb. degree of freedom to determine).
[0026] Step 2: The operator wears the upper ext...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More