

Lane departure recognition method, device, device and storage medium
A lane departure and recognition method technology, applied in the field of intelligent driving, can solve problems such as difficult to generate lanes, unable to issue lane departure warnings and departure information in time, and achieve the effect of enhancing safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
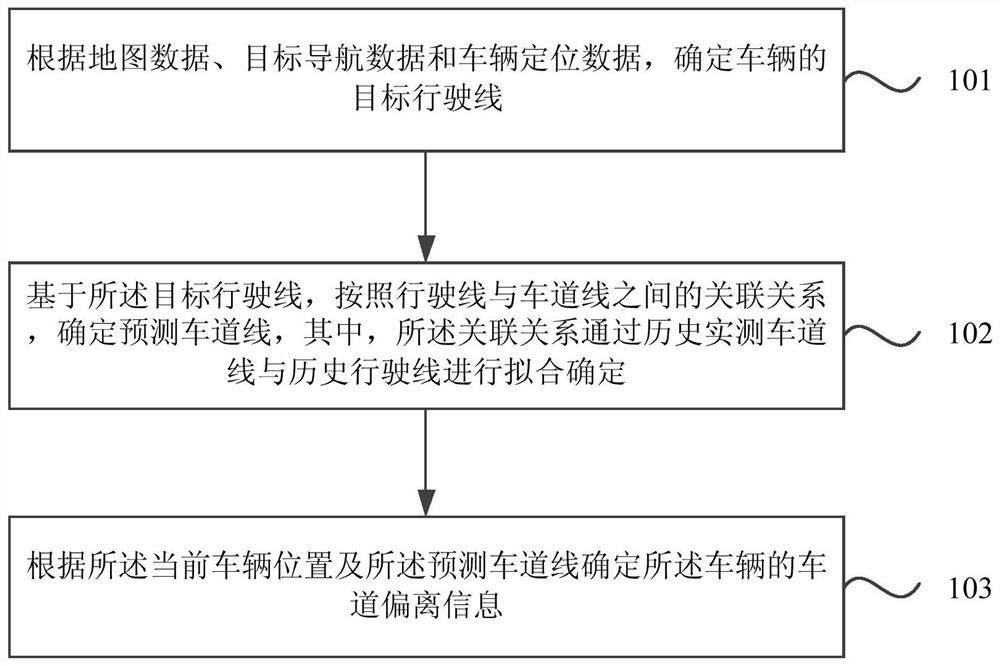
[0028] figure 1 It is a flow chart of a lane departure recognition method provided in Embodiment 1 of the present invention. This embodiment is applicable to the situation where a vehicle using intelligent driving technology recognizes lane departure. The method can be executed by a lane departure recognition device. The device can be realized by means of hardware and / or software, and generally can be integrated in the control system of the intelligent driving vehicle, see figure 1 , the method of the embodiment of the present invention includes:
[0029] Step 101. Determine the target driving line of the vehicle according to the map data, target navigation data and vehicle positioning data.
[0030] Wherein, the map data may be data stored in digital form for representing geographic location relationships, and may include traffic map data and geographical map data, etc. The specific form of map data may be a map database, which may be stored in a cloud server or locally in t...
Embodiment 2
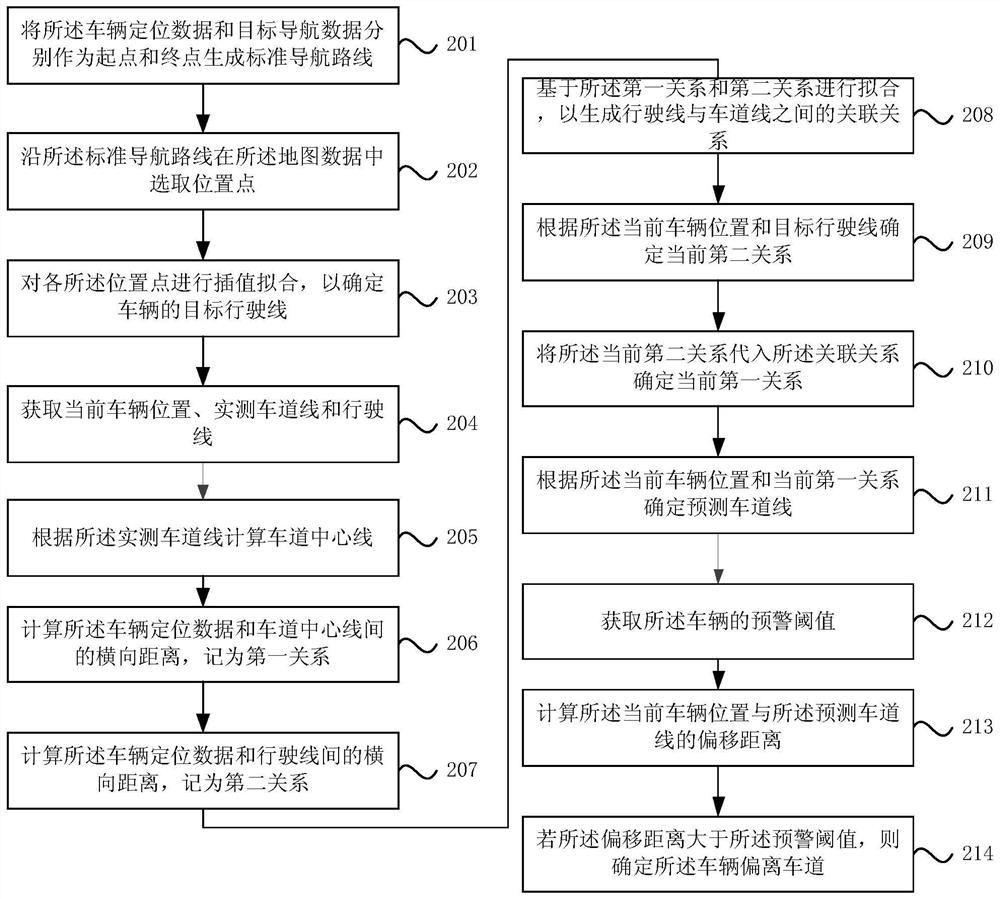
[0045] figure 2 It is a flow chart of a lane departure recognition method provided by Embodiment 2 of the present invention. This embodiment is a specific embodiment based on the above embodiments. Correspondingly, see figure 2 , the method of the embodiment of the present invention includes:
[0046] Step 201, using the vehicle positioning data and the target navigation data as the start point and the end point respectively to generate a standard navigation route.
[0047] Wherein, the standard navigation route may be a navigation route determined based on the accuracy level of the existing map data. For example, if the current map data can be as accurate as the road, then the standard navigation route may be a navigation route with the accuracy of the road.
[0048] Specifically, an existing method for generating a navigation route can be used to generate a navigation route with the vehicle positioning data and the target navigation data as the starting point and the end ...
Embodiment 3
[0091] Figure 4 It is a schematic structural diagram of a lane departure recognition device provided in Embodiment 3 of the present invention, capable of straightening the lane departure recognition method provided in any embodiment of the present invention, and having corresponding functional modules and beneficial effects for executing the method. The device can be implemented by software and / or hardware, and specifically includes: a driving line determination module 301 , a prediction module 302 and an early warning module 303 .
[0092] Wherein, the driving line determination module 301 is used to determine the target driving line of the vehicle according to the map data, target navigation data and vehicle positioning data;
[0093] The prediction module 302 is configured to determine the predicted lane line based on the target driving line and according to the association relationship between the driving line and the lane line, wherein the association relationship is det...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More