

Method of driving right allocation in human-machine shared driving lane keeping system
A lane keeping and driving right technology, which is applied in the field of driving right distribution in the lane departure assist control system, can solve the problems of reducing vehicle safety, sudden change of driving right, and reducing ride comfort, so as to improve comfort and safety, Reduce the sudden change of driving rights and enhance the effect of driving experience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0049] A method of driving rights allocation in a human machine co-driving lane is included in the human machine includes the following steps:
[0050] 1. Calculate the time of the wheel to the road boundary to the road boundary, TLC
[0051] This paper uses the calculation method of longitudinal TLC:
[0052]
[0053] Where DLC serves the vehicle from the current location to the distance from the vehicle, Vx It is the longitudinal speed of the vehicle.
[0054] 1) When TLC ≤ T tw At this time, the lane maintain the auxiliary system should be initiated, and the vibration of the driver's vehicle is deviated from the trend of the driveway through the steering wheel. tw The threshold for the lane from the auxiliary system;
[0055] 2) When TLC> T tw At this time, it is considered to be safe to travel, and the lane deviation assist system should be closed.
[0056] 2. Control allocation
[0057] The weight coefficient of the traditional human machine co-control is a fixed value or w...
Embodiment 2
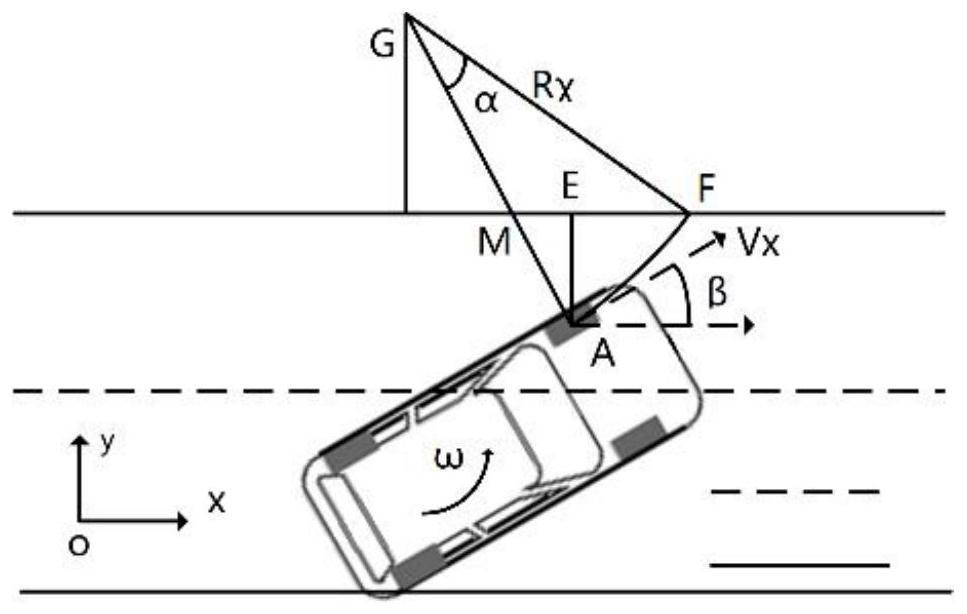
[0062] Example 2: A process for the method of driving rights in the human machine co-transportation system is: first identifying the vehicle road line and the vehicle state parameters by the vehicle environment perceived module. The TLC of the left and right wheels to the lane boundary is calculated by the vehicle state parameter, and a warning is issued to the driver when the TLC is less than a certain threshold. Then, the calculated TLC is used as one of the input parameters, the torque T actually input by the driver. d As another input parameter, the intensity of the discretion is determined by fuzzy control. However, in certain special circumstances, the fuzzy control cannot be accurately determined, so further adjustment is required to adapt to more complex situations.
[0063] 1. Calculation of TLC's time when the vehicle left and right wheels to the road boundary
[0064] my country's highway design standards requires minimum radius of curvature in the corner of the mountai...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More