

Automatic fixed-depth movement control method of ROV underwater robot
An underwater robot, motion control technology, applied in the direction of height or depth control, can solve the problems of poor stability, difficult to achieve, poor ability to resist underwater surge interference, to ensure mobility and stability, reduce energy loss And the effect of regulating frequency and control method is convenient and practical
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0069] Referring to the accompanying drawings, the present invention will be further described in detail with specific embodiments.
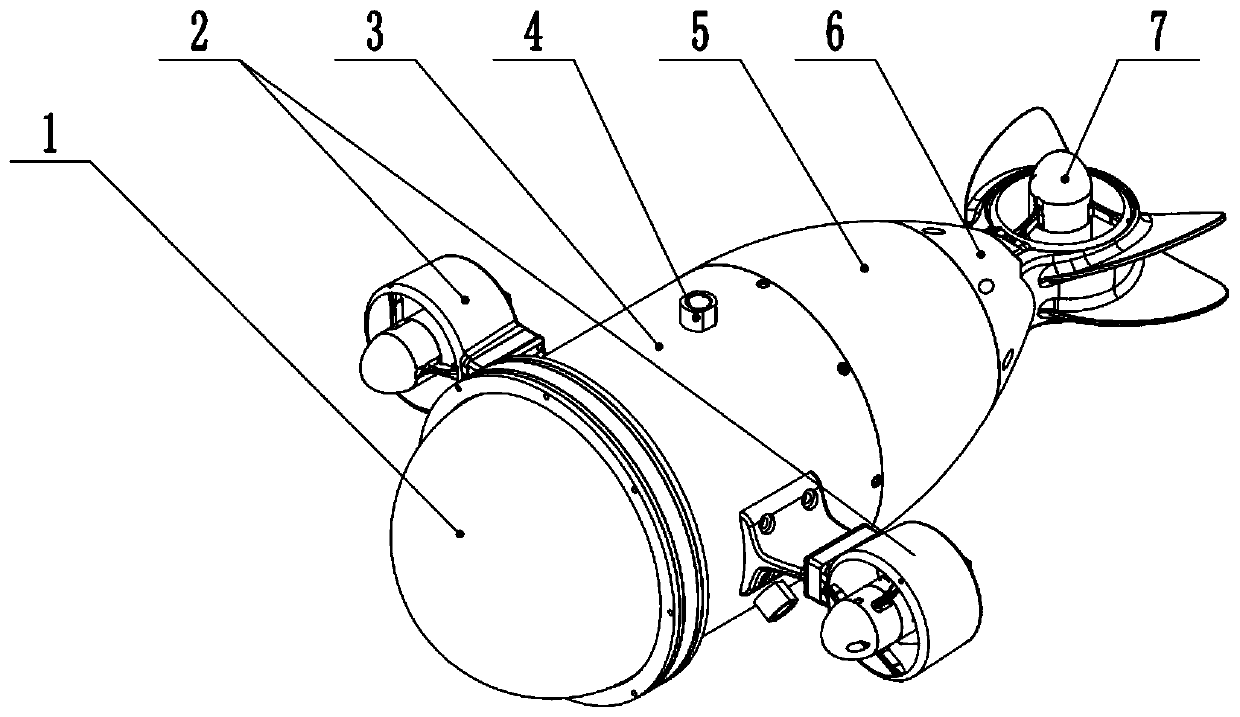
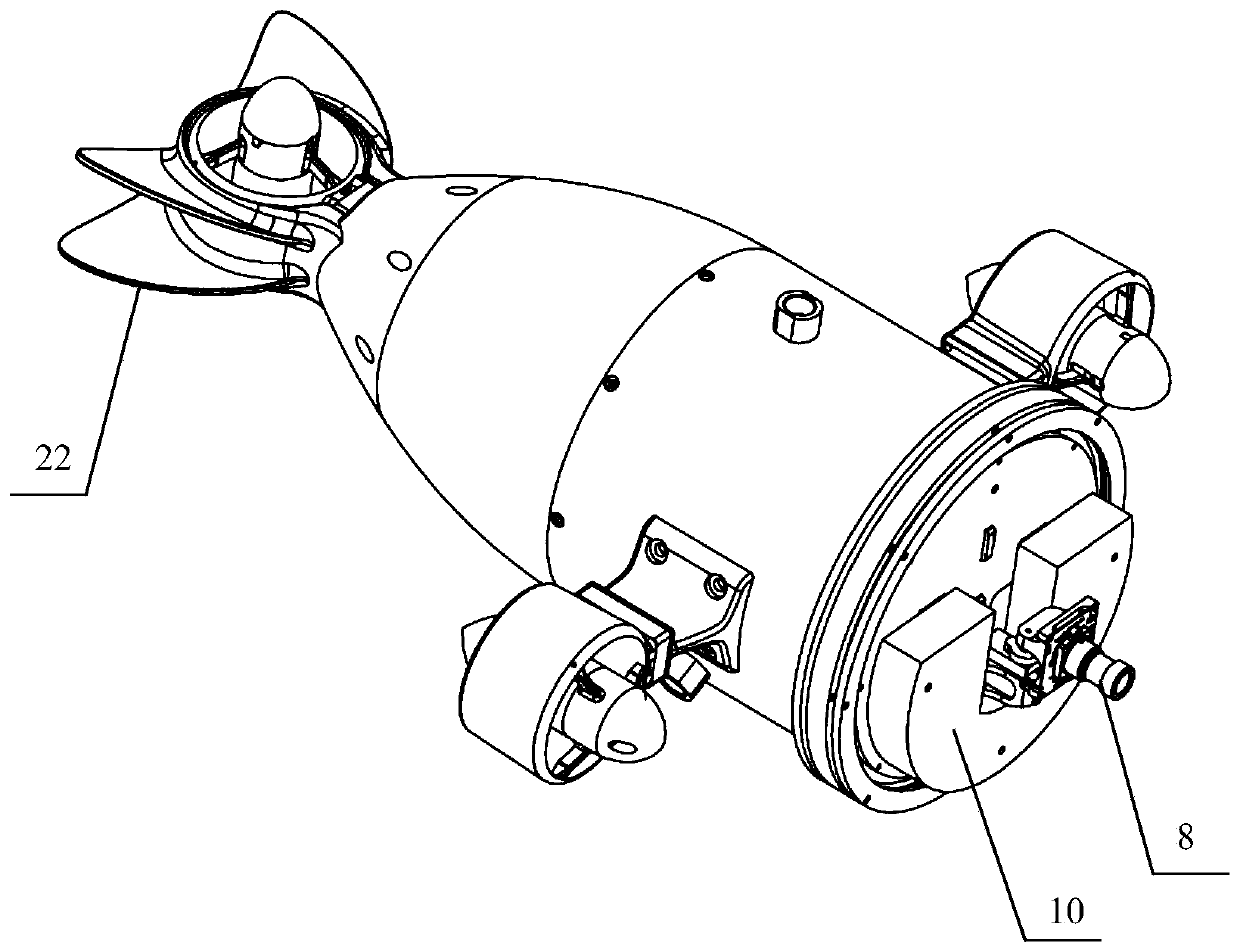
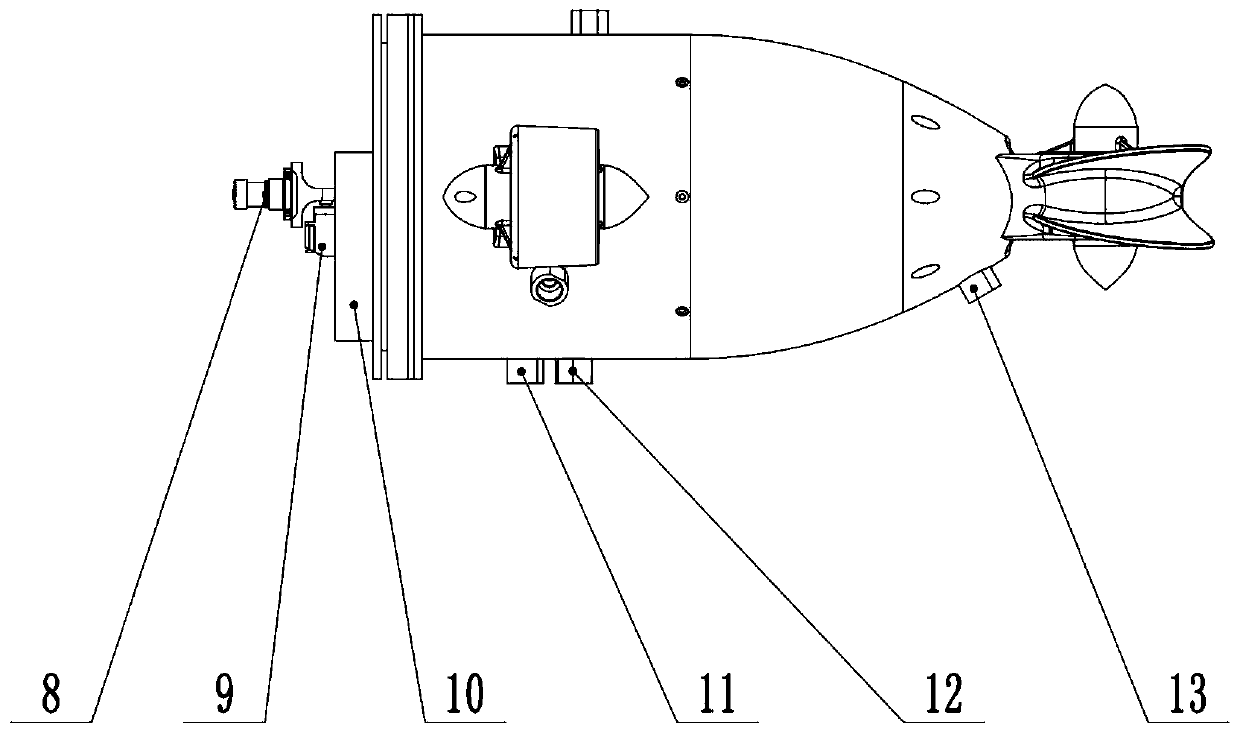
[0070] like Figure 1-3 As shown, the ROV underwater robot involved in the present invention includes a robot body, a power device and a control system. The robot body includes an acrylic dome cover 1, a cylindrical middle section shell 3, a water seal head 4, a transition section shell 5, a tail shell 6, a gravity block 10, threading screws 13, an acrylic dome cover 1 and a cylindrical middle section shell The front end of the body 3 is connected, the transition section shell 5 is connected to the rear end of the cylindrical middle section shell 3, the tail shell 6 is connected to the transition section shell 5, and the gravity block 10 is connected to the front end of the cylindrical middle section shell 3 , the threading screw 13 is connected with the tail casing 6, and the water sealing head 4 is connected with the cylindrical middle sectio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More