Visual stabilization control on the wheeled mobile robot in a dynamic scene
A mobile robot and dynamic scene technology, applied in the direction of instruments, manipulators, manufacturing tools, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
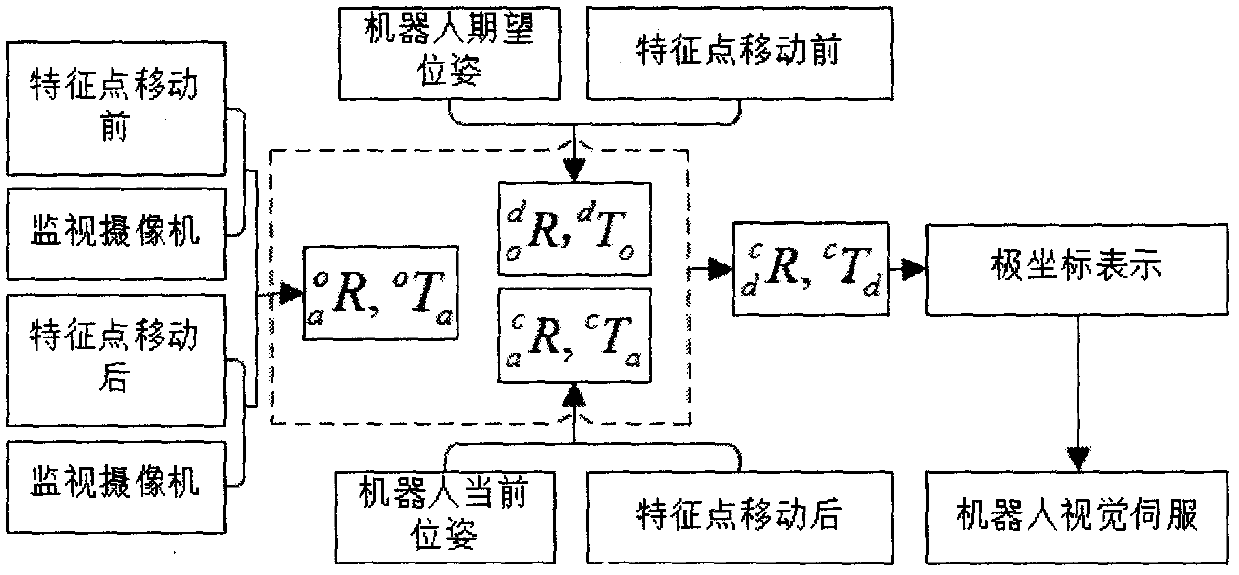
[0082] 1. A visual stabilization system for a wheeled mobile robot in a dynamic scene, characterized in that it comprises the following steps:
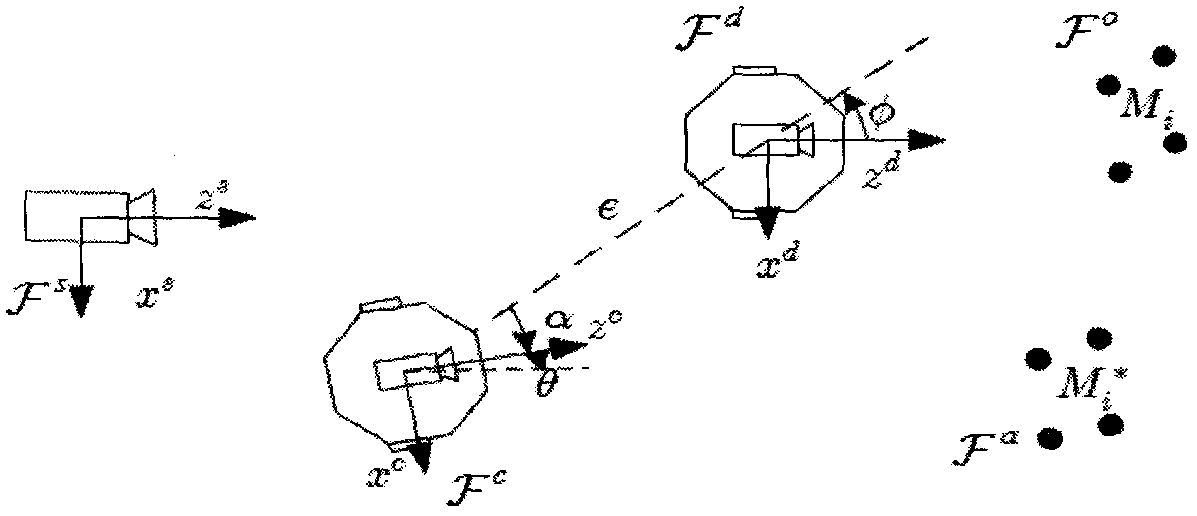
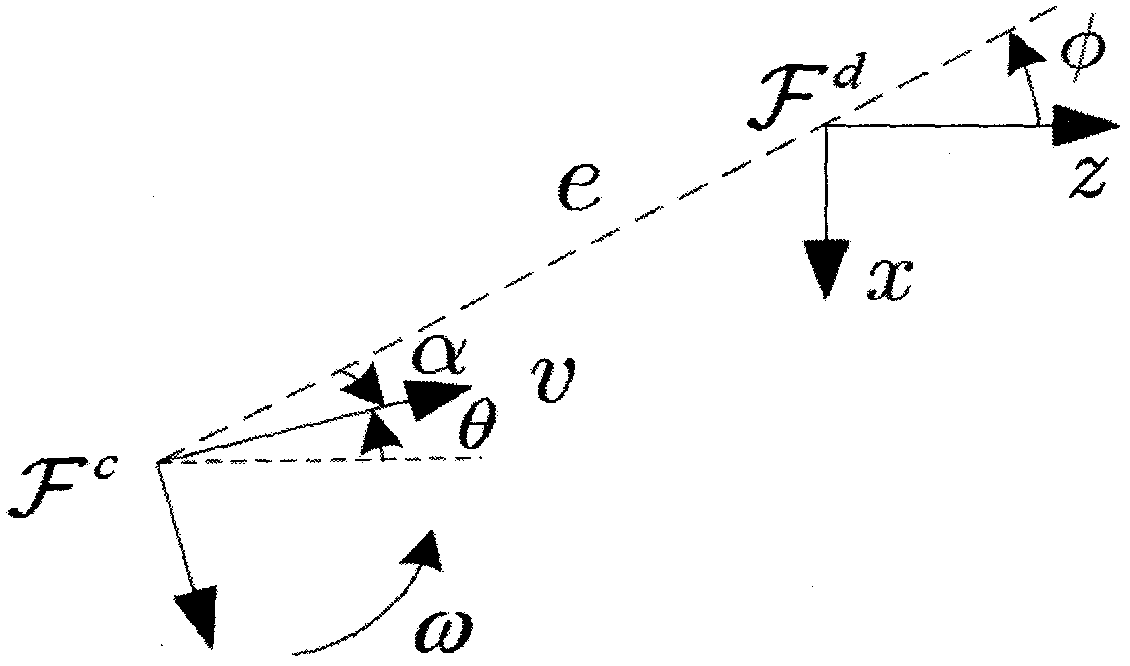
[0083] First, define the system coordinate system
[0084] Section 1.1, Description of the system coordinate system
[0085] A reference coordinate system is defined based on the visual target Set the camera to coincide with the coordinate system of the mobile robot, and define the robot / camera coordinate system at the current pose as in The origin of is at the optical center of the camera, that is, directly above the center point of the wheel axis, the z c The axis coincides with the optical axis of the camera, and also coincides with the forward direction of the robot, x c The axis is parallel to the axis of the robot wheel. the y c axis perpendicular to z c x c flat, is the desired pose of the robot, In order to fix the position of the camera, the function of the fixed camera is to monitor the movement of the featu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com