

Planar and spatial feature-based laser radar and camera automatic joint calibration method
A technology of lidar and spatial features, which is used in the re-radiation of electromagnetic waves, image data processing, measurement devices, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
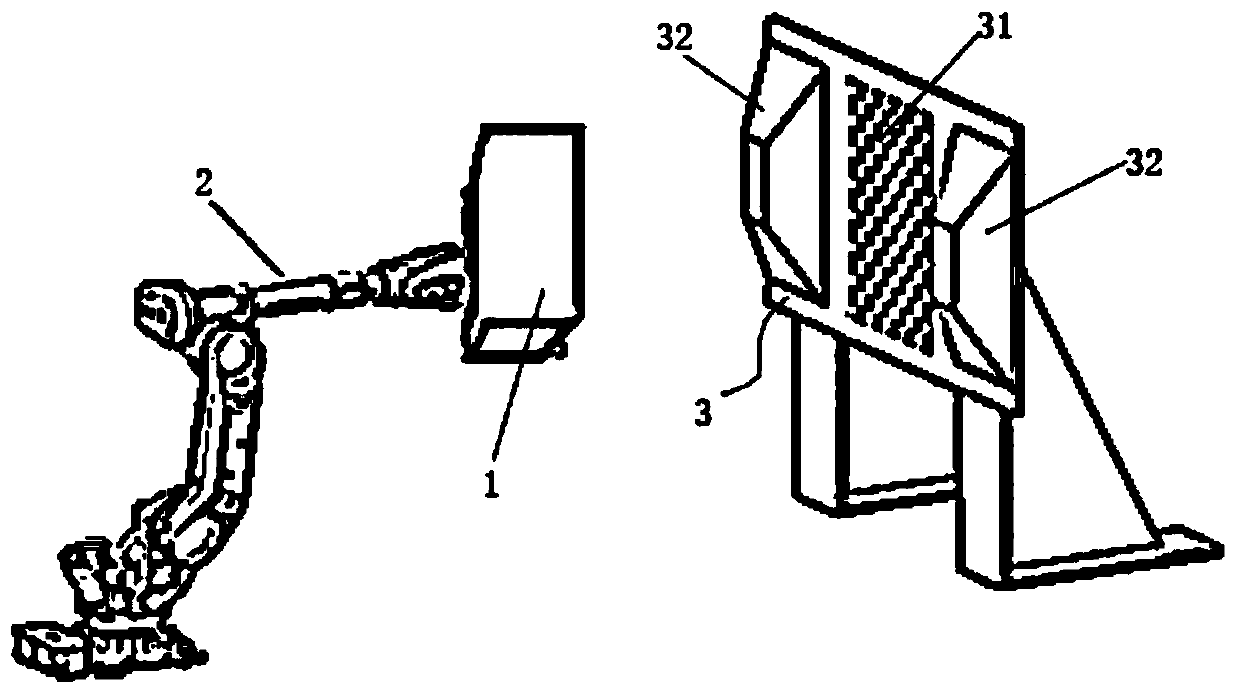
[0012] Automatic joint calibration method of lidar and camera based on plane and space features, see figure 1 : Install the laser radar and the camera on the equipment to be calibrated 1, and then fix the equipment to be calibrated 1 on the output end of the six-axis mechanical arm 2. In the initial state, a calibration plate 3 is set directly in front of the laser radar and the camera. The calibration plate 3 is designed with two geometric features, plane calibration feature 31 and space calibration feature 32; the camera extracts the calibration points in the plane calibration feature 31, and the laser radar extracts the calibration points in the space calibration feature to drive the output end of the six-axis robot arm Drive the equipment to be calibrated to move according to the set trajectory, obtain the corresponding calibration plate image through the camera, and calibrate the internal and external parameters of the camera through Zhang Zhengyou’s calibration method; us...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More