

An intelligent vehicle passable area detection method based on multi-source information fusion
A multi-source information fusion and passable area technology, which is applied in the field of intelligent vehicle passable area detection, can solve problems such as high labor costs, inability to universally apply structured roads and unstructured roads, and insufficient consideration of motion information characteristics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] In the drawings, the same or similar reference numerals are used to denote the same or similar elements or elements having the same or similar functions. Embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
[0062] In this article, "front" can be understood as corresponding to the direction pointing to the front of the car, and "rear" is opposite to "front". "Right" can be understood as the right direction of the driver facing forward, and "left" is opposite to "right". "Up" can be understood as corresponding to the direction pointing to the roof, and "down" is opposite to "front".
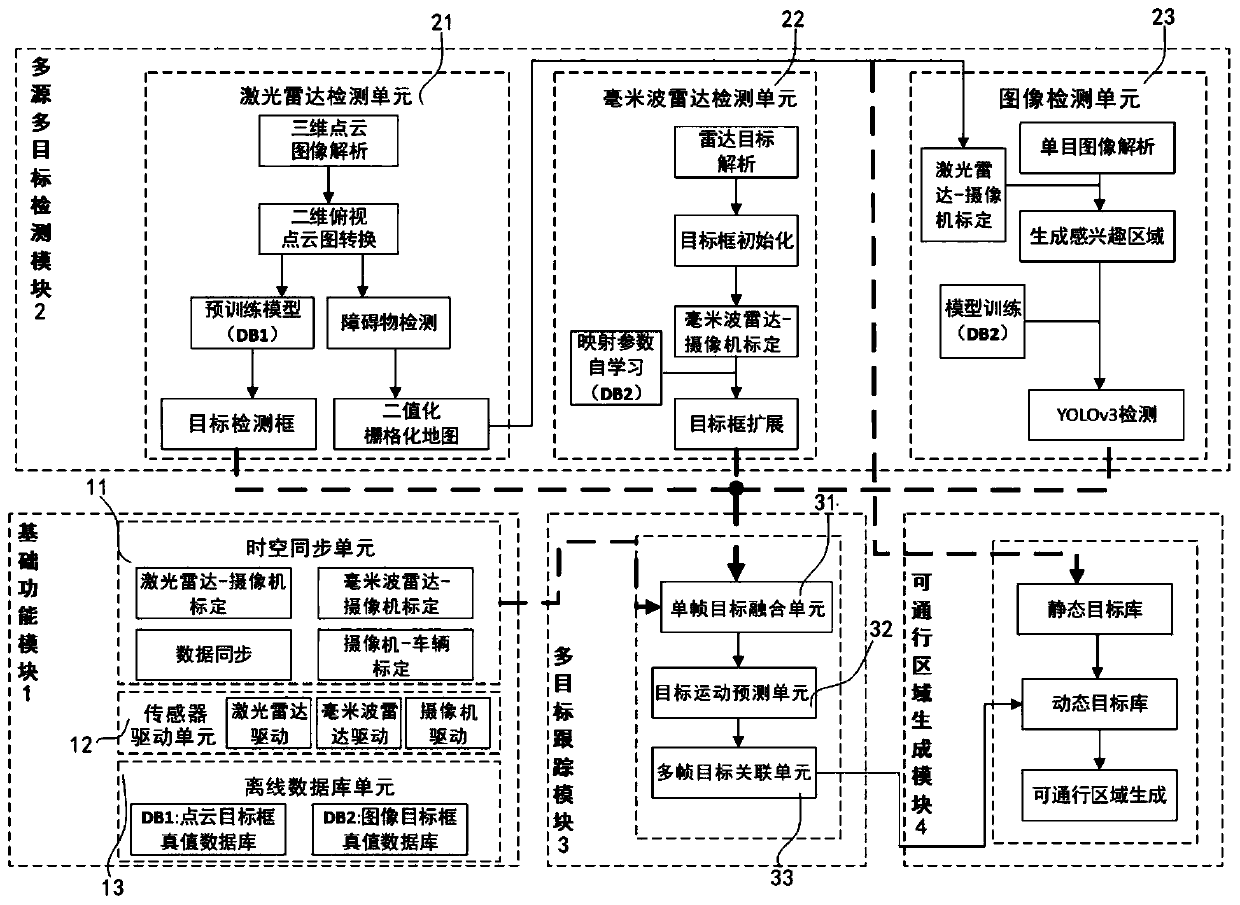
[0063] The method for detecting the passable area of an intelligent vehicle based on multi-source information fusion provided in this embodiment is applicable to combinations of sensors with different configurations. For example, the vehicle-mounted sensors involved in this embodiment include cameras, laser radars, and mil...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More