

A multi-sensor non-sequential measurement asynchronous fusion method based on GM-PHD filtering
A multi-sensor, fusion method technology, applied in the direction of instruments, character and pattern recognition, computer parts, etc., can solve the problems of asynchronous fusion of non-sequential measurement, complex multi-target asynchronous information fusion, many sensors and few sensors, etc., to avoid Data association problem, easy iterative update, and the effect of ensuring convergence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
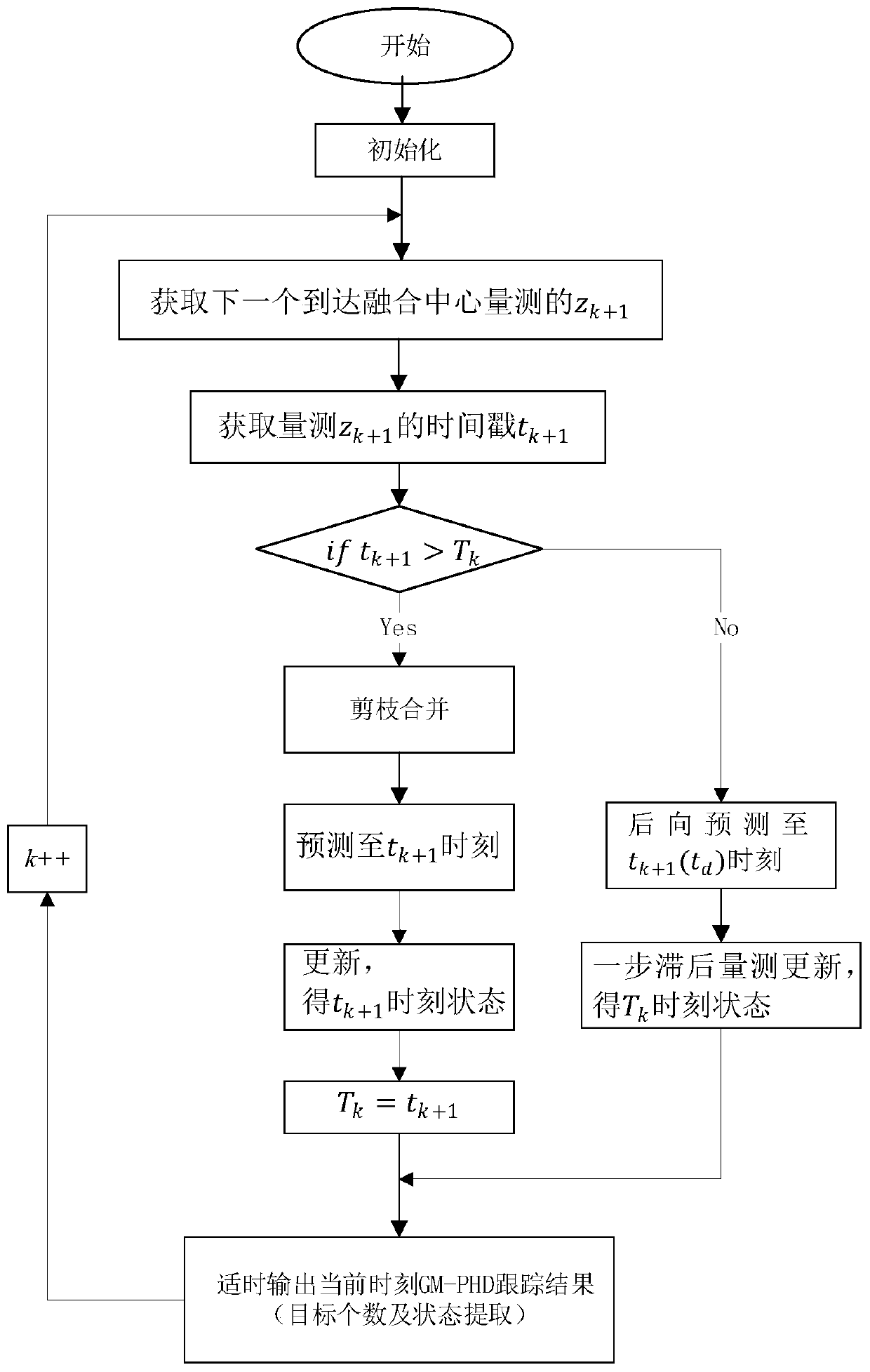
[0018] The implementation of the present invention will be described in detail below in conjunction with the accompanying drawings, and specific operation modes and implementation steps will be given.
[0019] Step 1: Establish a multi-sensor multi-target tracking model and initialize it
[0020] Under the framework of random finite sets, the states and measurements of multiple targets can be regarded as random finite sets, assuming t k There are N(k) states and M(k) measurements at any time, and the states and measurements of multiple targets can be expressed in a finite set form:
[0021] x k ={x k,1 , x k,2 ,...,x k,N(k)} (1)
[0022] Z k ={z k,1 ,z k,2 ,...,z k,N(k)} (2)
[0023] where x k,1 , x k,2 ,...,x k,N(k) are respectively the 1st, 2nd, ..., N(k) target states, z k,1 ,z k,2 ,...,z k,N(k) are the 1st, 2nd, ..., M(k) measurements respectively.
[0024] For a single target, the motion model is:
[0025] x k =F(k,k-1)x k-1 +v(k,k-1) (3)
[0026] in,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More