
Eureka
For R&D, Eureka makes reading and utilizing patents & technical documents easy.
Eureka AIR
Designed for self-driven R&D workflows. Generate viable solutions, solve complex R&D challenges, empower your innovation with AI.

Eureka Materials
Designed for material experts only. Revolutionize your material R&D, from search, analyze, to developing new materials.

TechResearch
Generate reliable direction feasibility study reports for your R&D in just a few steps.

TechSeek
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

TechMind
As an expert in R&D Theories, TechMind can generates customized viable solutions instantly.

TechRisk
Analyze your overall solution with one click, know your potential R&D risks in advance.

TechMonitor
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Following simulated animal running gear
A walking device and animal technology, which is applied to animal toys for riding, entertainment devices, entertainment and other directions, can solve the problems of a sightseeing train with a single running texture, no fitness function, and inability to attract passengers to ride repeatedly.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
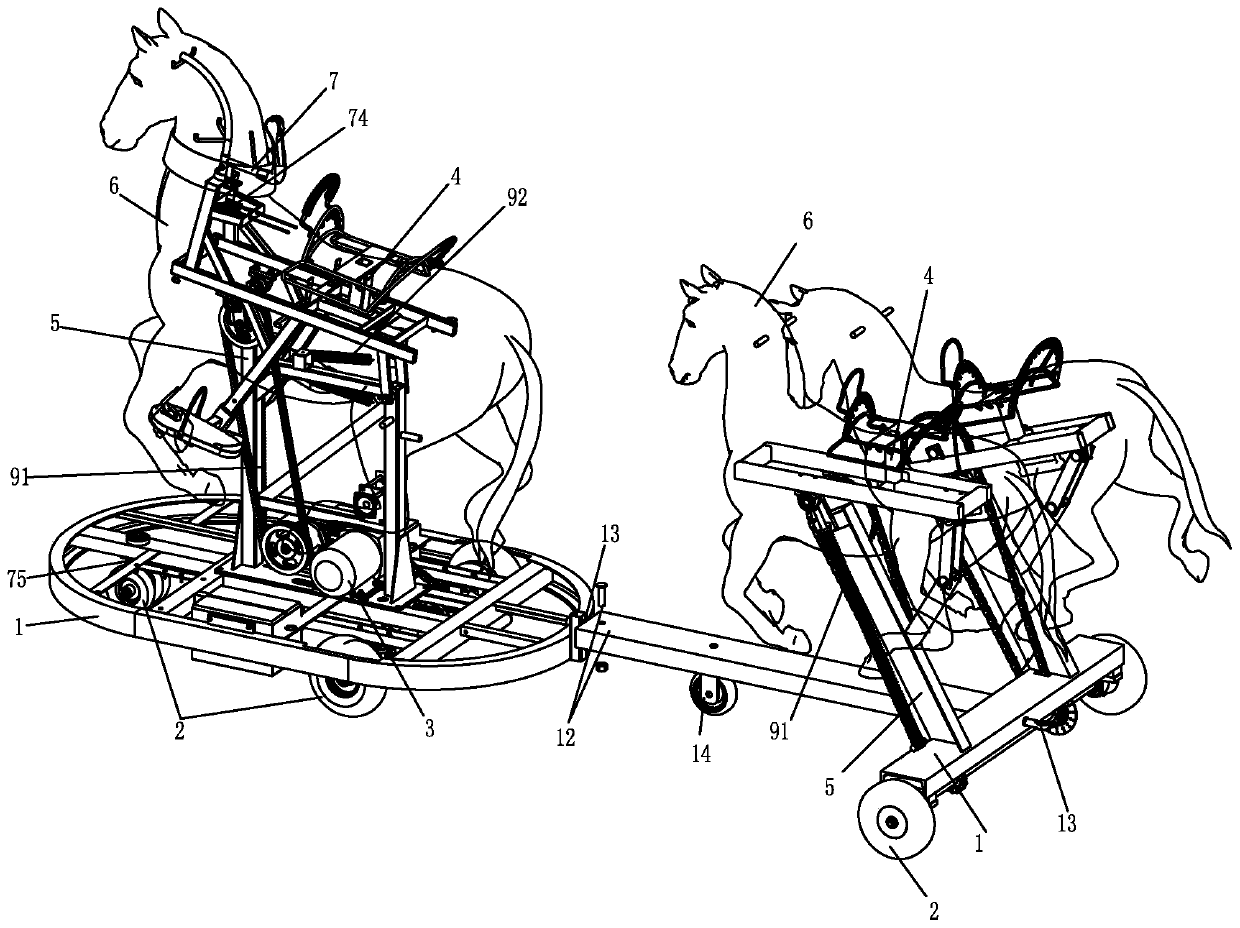
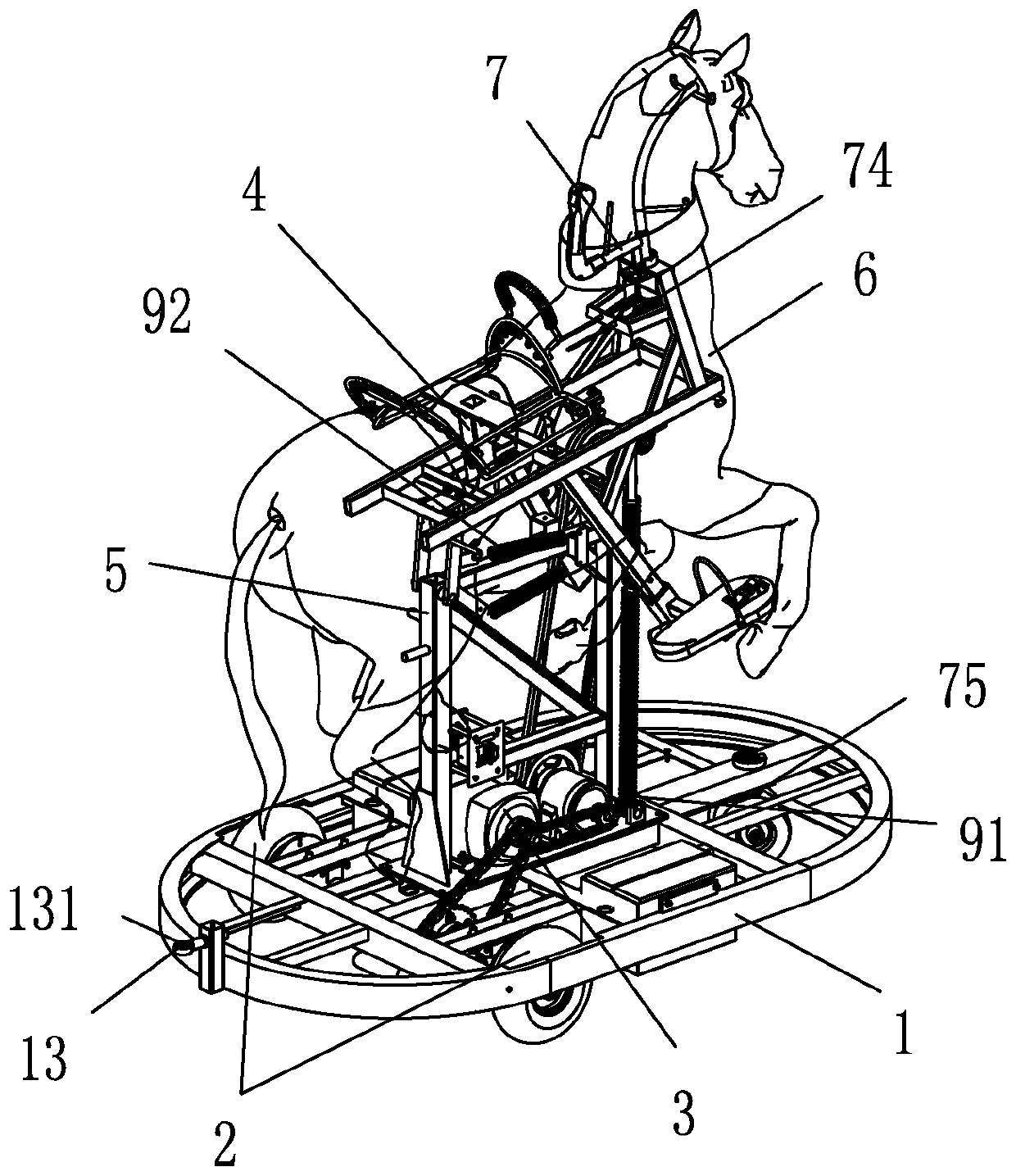
[0069] See Figure 1 to Figure 12 , the present embodiment provides a follow-up simulated animal walking device, comprising: a horizontal walking mechanism and at least one simulated animal movement assembly;
[0070] The horizontal traveling mechanism includes a traveling mechanism 2, a chassis 1, a driving mechanism 3, and a transmission mechanism 8. The driving mechanism 3 and the traveling mechanism are installed on the chassis 1 to drive the chassis 1 to move along the parallel direction of the ground surface;
[0071] The simulated animal movement assembly includes a stand 5, a movement mechanism 4, and at least one animal model 6;
[0072] When the horizontal walking mechanism moves along the parallel direction of the ground surface, the animal model 6 simulates the posture of the animal to walk; the at least one animal model 6 walks synchronously or asynchronously.
[0073] When there are at least two simulated animal movement components, the simulated animal walking ...
Embodiment 2
[0094] Such as figure 1 As shown, the above is a technical solution in which the driving mechanism 3 is built in the following simulated animal walking device, figure 1 Among the two simulated animal movement components, the first one has a built-in drive mechanism 3 . As a simple replacement, the driving mechanism 3 and the following simulated animal walking device can also be separately arranged, so that the chassis 1 moves along the horizontal direction under the traction or promotion of the horizontal walking mechanism; as Figure 13 shown. Figure 13 The four simulated animal motion components in the simulation do not have drive components and need an external power source to drive them.
[0095] Figure 13 Compared with the embodiment, the simulated animal movement components in the embodiment can reduce the number of driving components, and the steering mechanism can be reduced, and the steering operation is performed by an external power source. Of course, all the ...
Embodiment 3
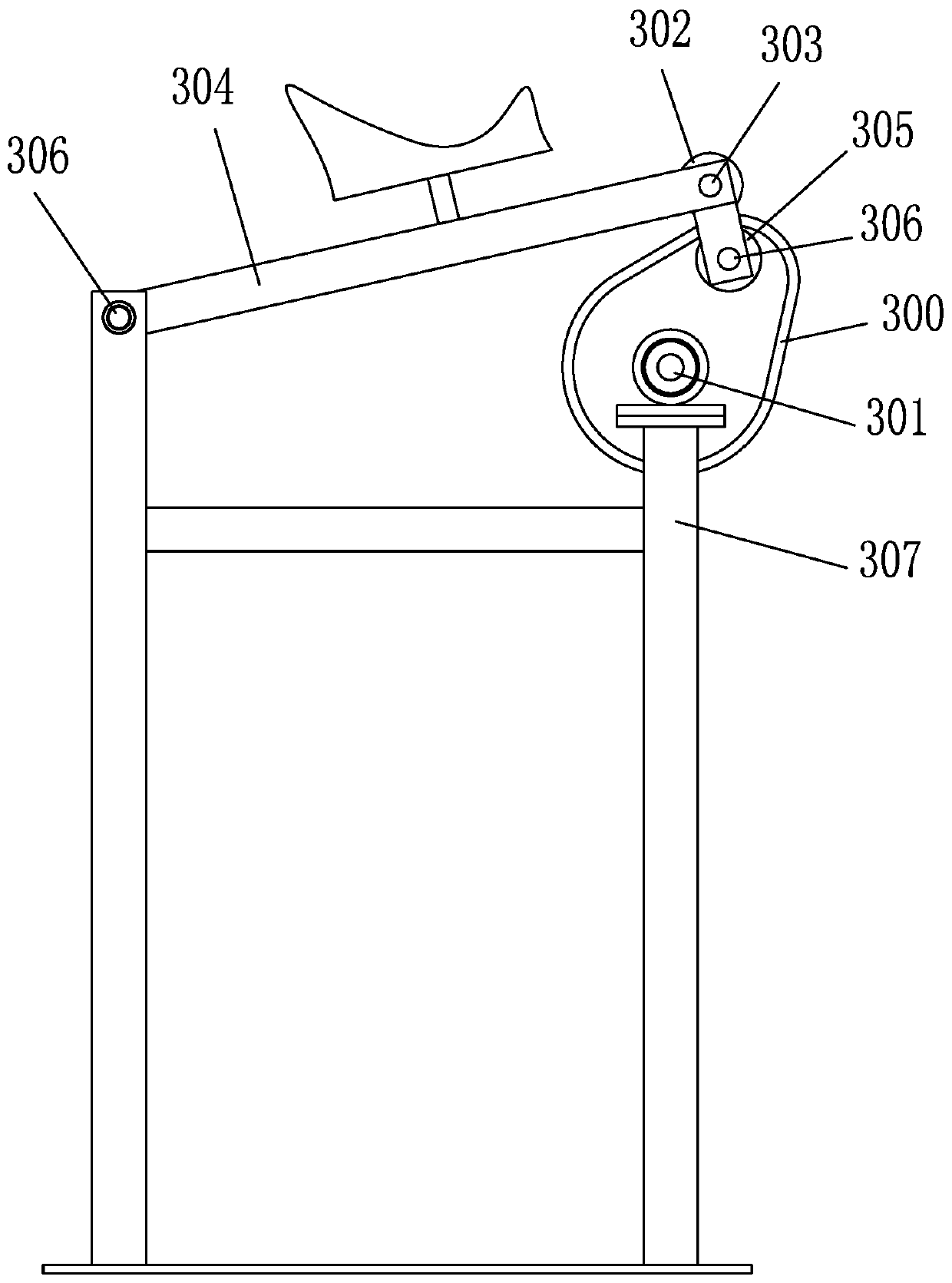
[0097] refer to Figure 14 , the difference between this embodiment and Embodiment 1 is that the motion mechanism in this embodiment is an orbital motion mechanism, the crank 200 cooperates with the first slider 201, and the crank 200 can slide in the first slider 201; the first slider The block 201 and the horizontal frame 202 are cooperatively connected by the first rotating shaft 203, and the first sliding block 201 and the horizontal frame 202 can rotate relative to each other; track movement; the horizontal frame 202 cooperates with the horizontal guide post 205 through the second rotating shaft 206, and the horizontal frame 202 and the horizontal guide post 206 can rotate relatively; the horizontal guide post 205 cooperates with the second slide block 207, The horizontal guide post 205 can slide in the second slide block 207 ; the second slide block 207 is installed on the stand 208 . When the crank 200 rotates, the motion mechanism can drive the driving shaft 209 to mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com