

Collaborative search blocking method based on ground robot
A robot and ground technology, applied in the control of finding targets, two-dimensional position/channel control, etc., can solve the problems of recapture, difficulty in achieving high efficiency and accuracy, and difficulty in achieving real-time detection, so as to improve stability and reliability , strong stability and good scalability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
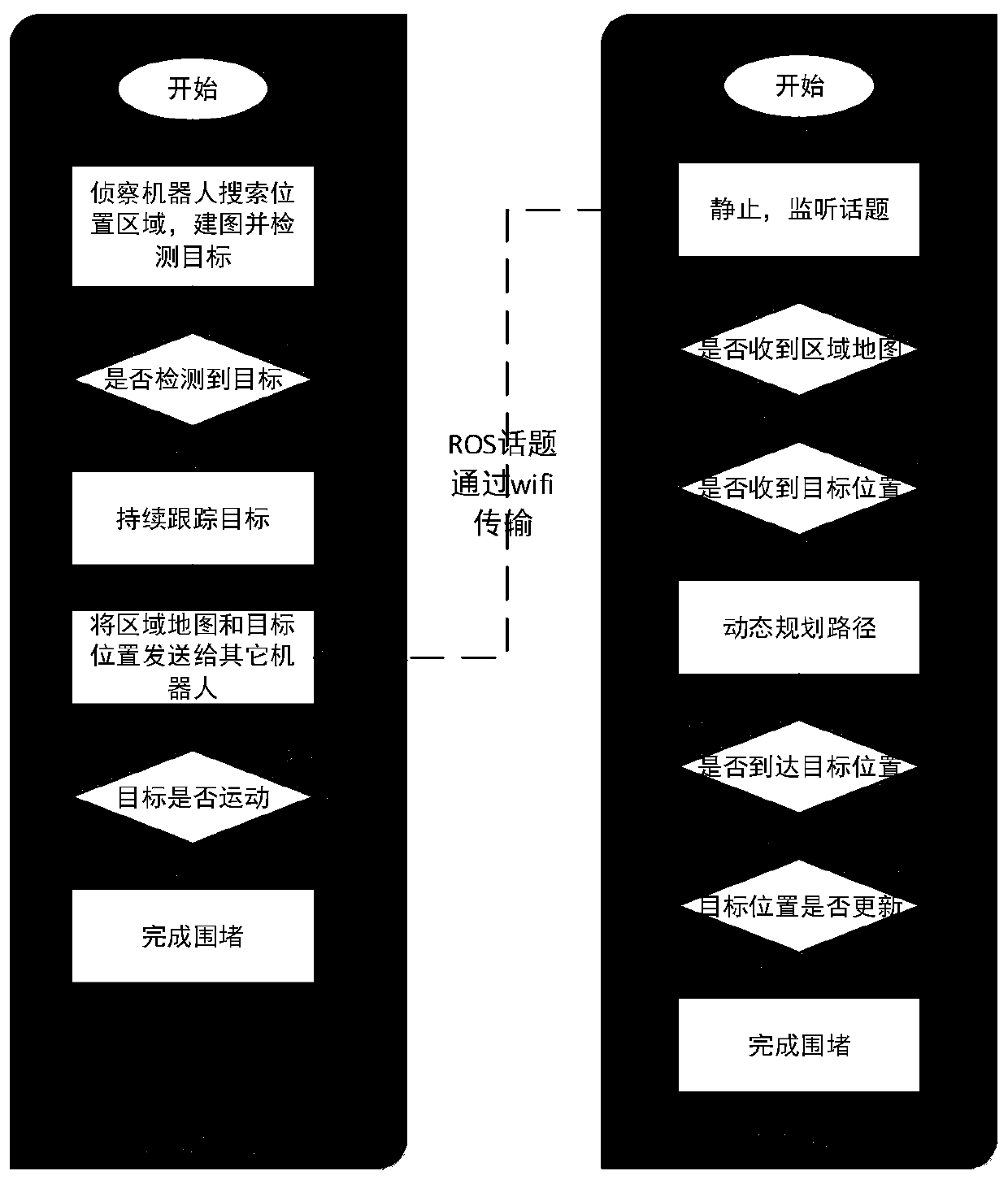
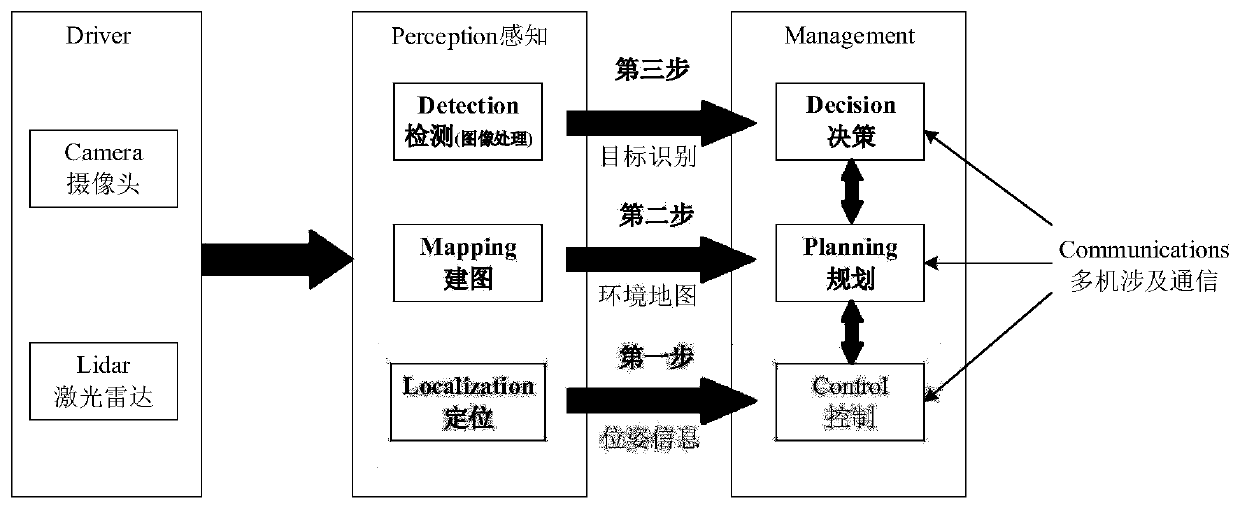
[0035] In view of the above problems, the present invention aims to provide a collaborative search and containment platform for ground robots. The ground robot is equipped with kinectv2 (a binocular camera released by Microsoft) as a sensing device, and JetsonTX2 (an airborne processor released by Nvidia) as a processor, and one of them is equipped with an additional 16-line laser radar velodyne VLP-16. Yu Jiantu. A "search robot" equipped with lidar uses lidar to build a map of the environment and transmit the map to other robots. All robots acquire and process the image information of the surrounding environment through the camera, and use the pre-trained detection model and tracking algorithm to identify the specified target object among multiple objects and track it for a long time. data transmission. A robot detects a target, tracks it, and sends information about the target's location to other ground robots in real time. Other robots carry out real-time path planning ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More