

AR navigation method and device, vehicle device, server and medium
A navigation method and equipment technology, applied in the field of Internet of Vehicles, can solve the problem that lane lines cannot be recognized and displayed normally, and achieve the effect of improving accuracy and real-time performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
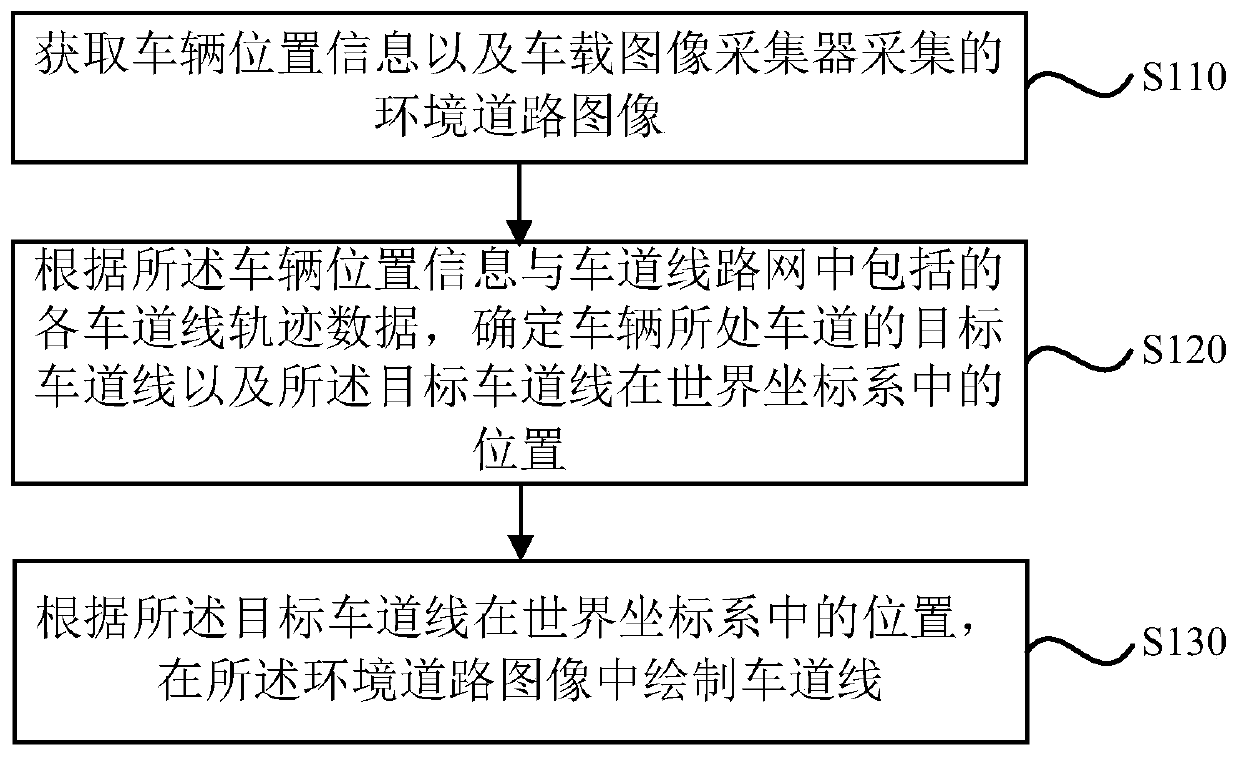
[0039] figure 1 It is a flowchart of an AR navigation method in Embodiment 1 of the present invention. The AR navigation method provided in this embodiment is executed by the vehicle-end device, and is applicable to the situation where the vehicle uses the vehicle-end device for navigation during driving. The method can be performed by an AR navigation device, and the device can be implemented by software and / or hardware. This device can be integrated in the vehicle-end equipment. see figure 1 , the implementation method specifically includes:
[0040] S110. Acquire vehicle location information and environmental road images collected by the vehicle-mounted image collector.
[0041] Specifically, the vehicle is provided with a GPS (Global Positioning System, Global Positioning System), and the location information of the vehicle can be obtained in real time through the GPS. In addition, the vehicle is provided with at least one image collector, which can be installed above ...
Embodiment 2
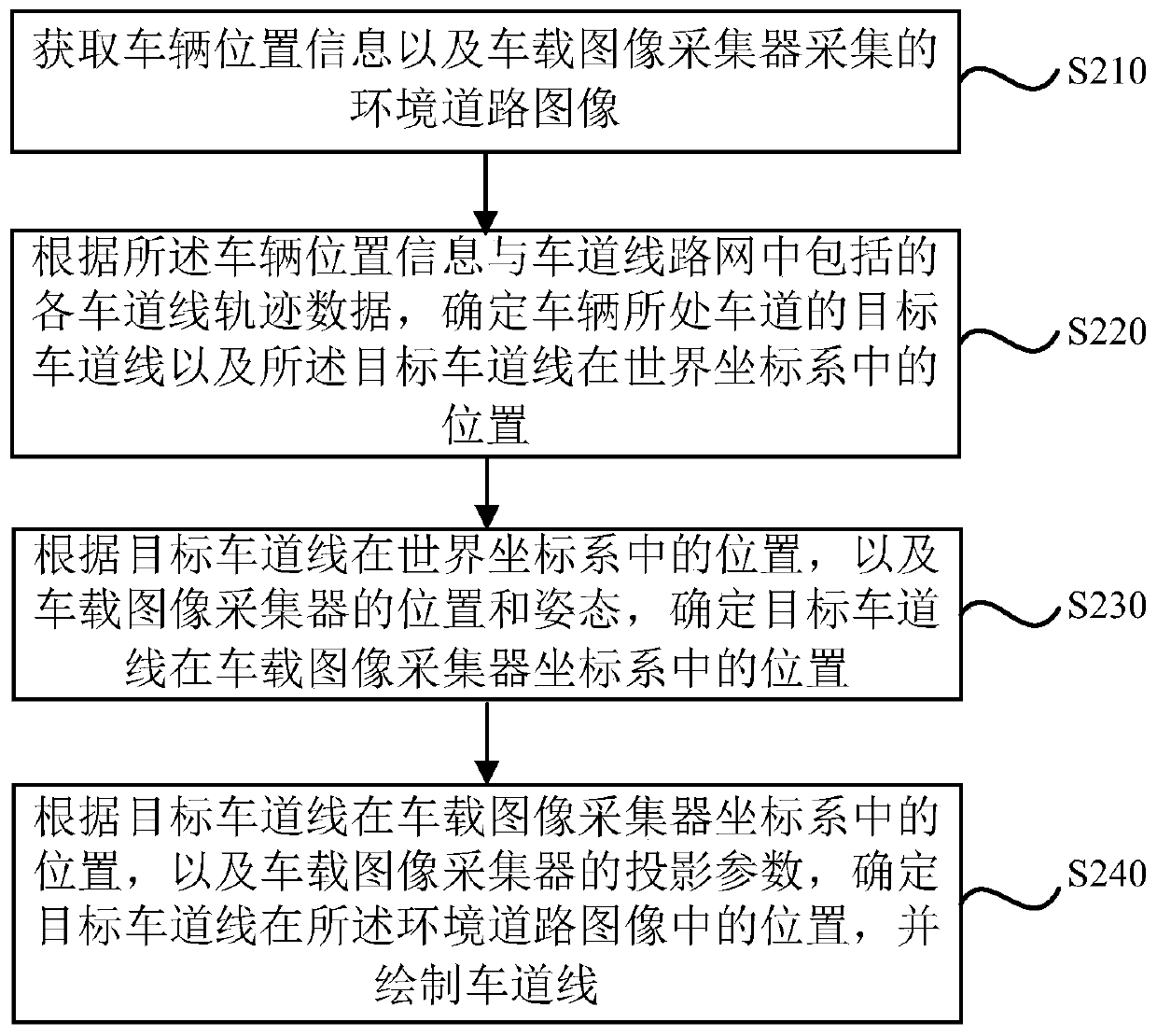
[0049] image 3 It is a flowchart of an AR navigation method in Embodiment 2 of the present invention. This embodiment is optimized on the basis of the above-mentioned embodiments, and details that are not described in this embodiment can be found in the above-mentioned embodiments. see image 3 , the AR navigation method provided in this embodiment includes:
[0050] S210. Acquire the vehicle location information and the environmental road image collected by the vehicle image collector.
[0051] S220. Determine the target lane line of the lane where the vehicle is located and the position of the target lane line in the world coordinate system according to the vehicle position information and the track data of each lane line included in the lane line network.
[0052] Optionally, the lane network is constructed in the following manner: during the vehicle navigation process, according to the vehicle's speed, acceleration, angular velocity, the vehicle's calibrated position i...
Embodiment 3
[0064] Figure 4 It is a flowchart of an AR navigation method in Embodiment 3 of the present invention. The AR navigation method provided in this embodiment is executed by the server, and is applicable to the situation where the vehicle performs AR navigation according to the lane network of the server during driving. The method can be executed by an AR navigation device, which can be implemented by software and / or or hardware, and the device can be integrated in the server. see Figure 4 For details not described in detail in this embodiment, please refer to the above-mentioned embodiment. The method of this implementation specifically includes:
[0065] S310. Obtain the location information of the target vehicle sent by the vehicle-end device.
[0066] Specifically, the server receives the location information of the target vehicle sent by the vehicle-end device.
[0067] S320. Match the position information of the target vehicle with the trajectory data of each lane lin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More