

Unmanned surface vehicle collision avoidance method based on genetic algorithm and particle swarm optimization algorithm
A technology of particle swarm algorithm and genetic algorithm, which is applied in the field of collision avoidance of unmanned boats in maritime intelligent transportation technology, can solve problems such as path planning and calculation without avoidance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
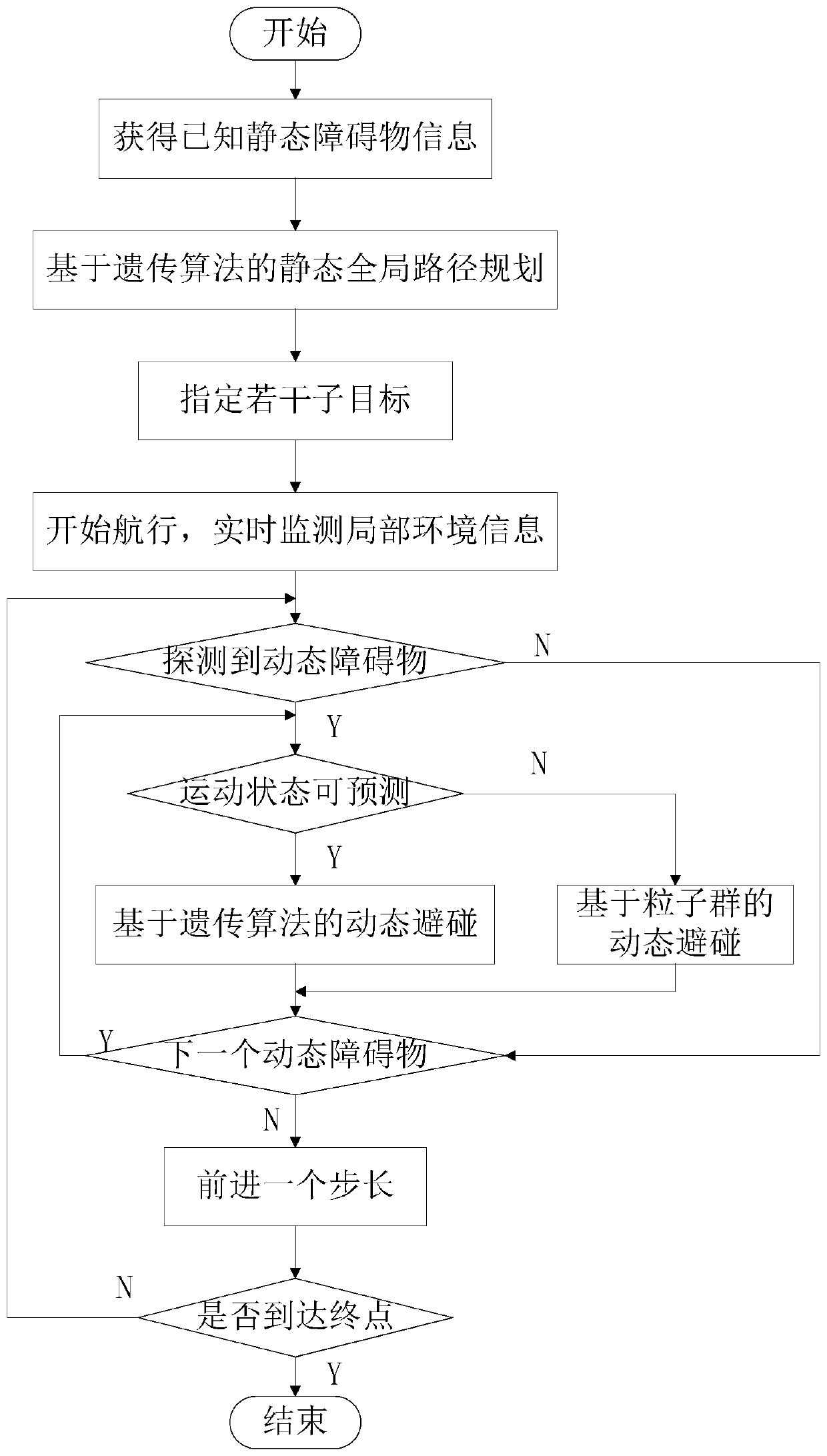
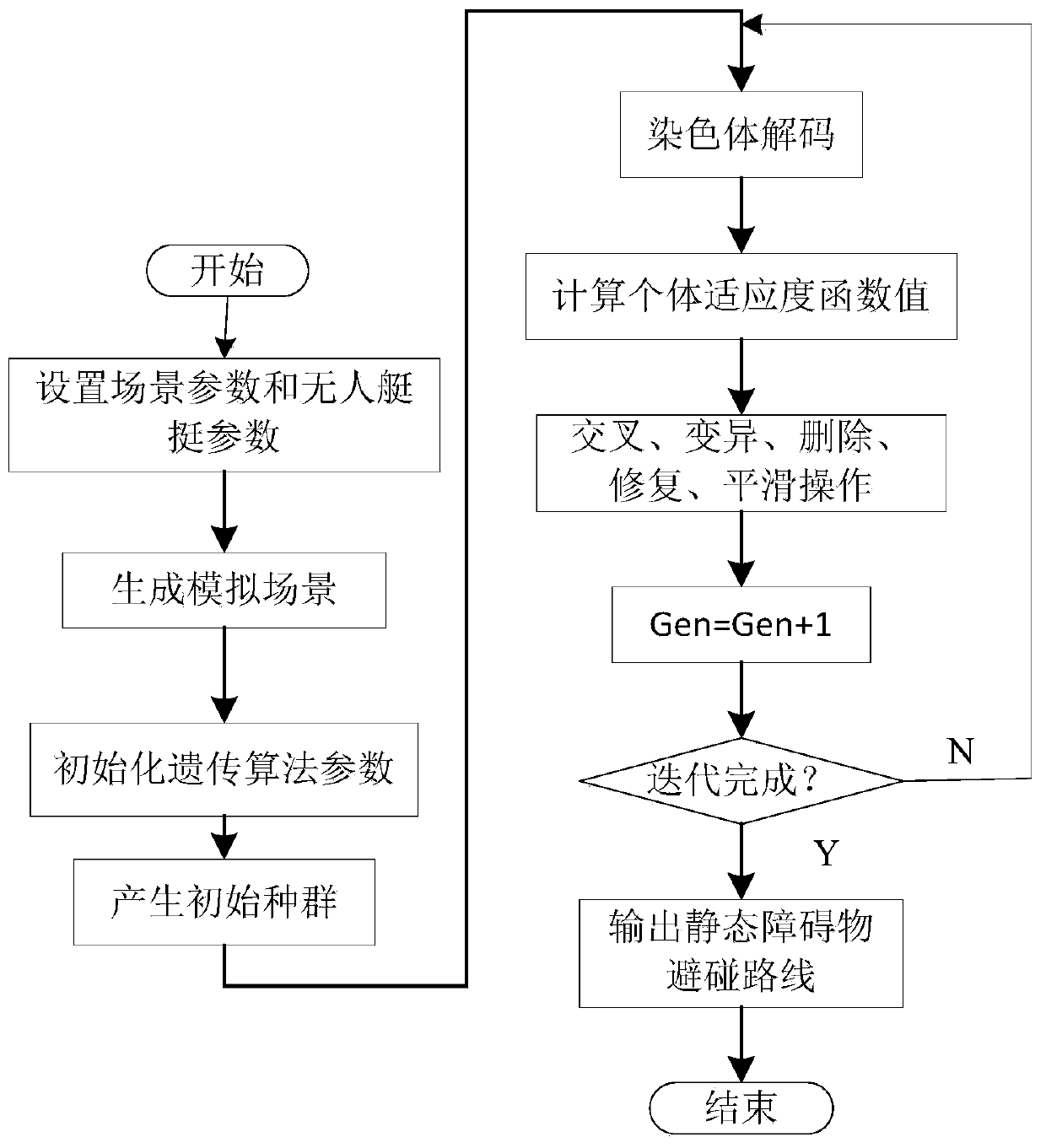
[0085] In order to make the above-mentioned purposes, features and advantages of the present invention more obvious and understandable, the present invention will be further described below in conjunction with the accompanying drawings:
[0086] Technical scheme of the present invention is realized like this:
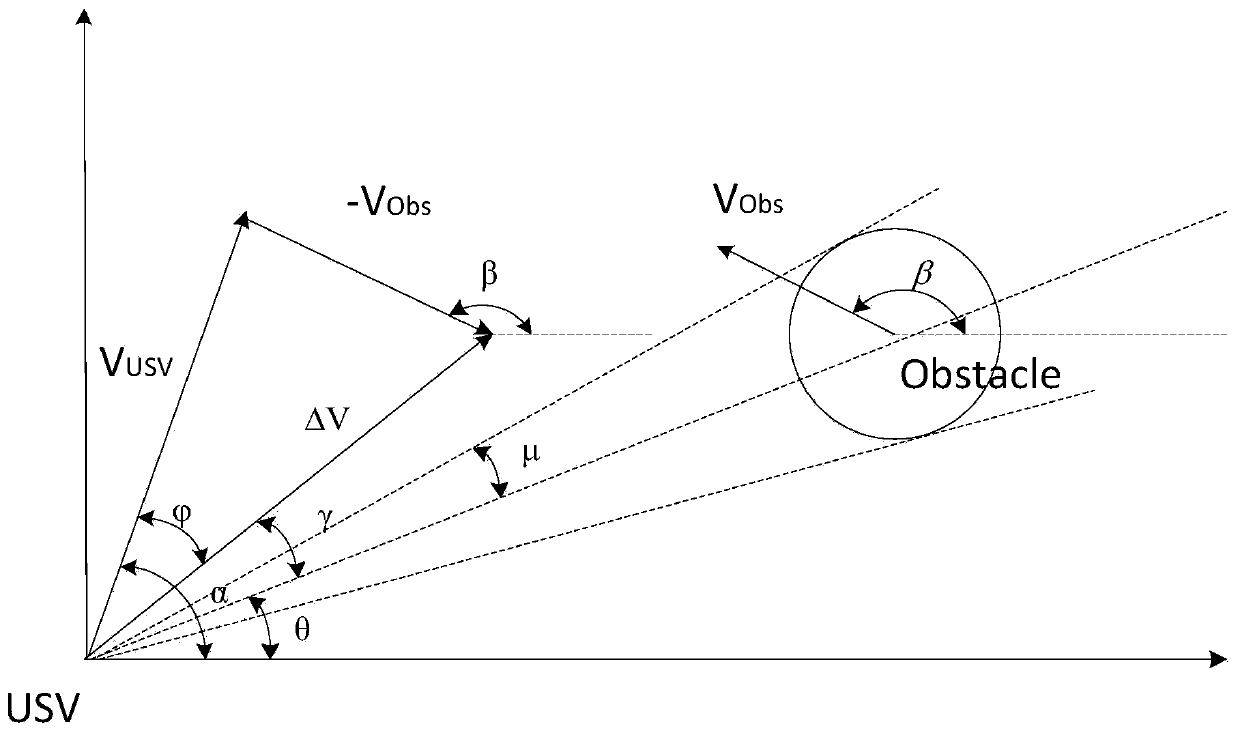
[0087] 1. Research on the relevant parameters and collision avoidance constraint rules in path planning and collision avoidance of unmanned vehicles:
[0088] The mathematical model parameters of the motion of the unmanned boat involve the position and speed of the unmanned boat and the position and speed of obstacles. The relative speed, relative position and relative orientation motion parameters of the two derived from this. Four different collision situations of unmanned vehicle and obstacle, frontal obstacle avoidance, overrun obstacle avoidance, right chord crossing and left chord crossing obstacle avoidance are summarized. The restraint rules for collision avoida...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More