

Flexible gripper with surface micro structure
A microstructure, flexible finger technology, applied in manipulators, manufacturing tools, chucks, etc., can solve the problems of difficult to meet the complex shape, various types of effective grasping, etc., to achieve the effect of compact structure, convenient operation and effective grasping
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The specific implementation manner of the present invention will be described below in conjunction with the accompanying drawings.
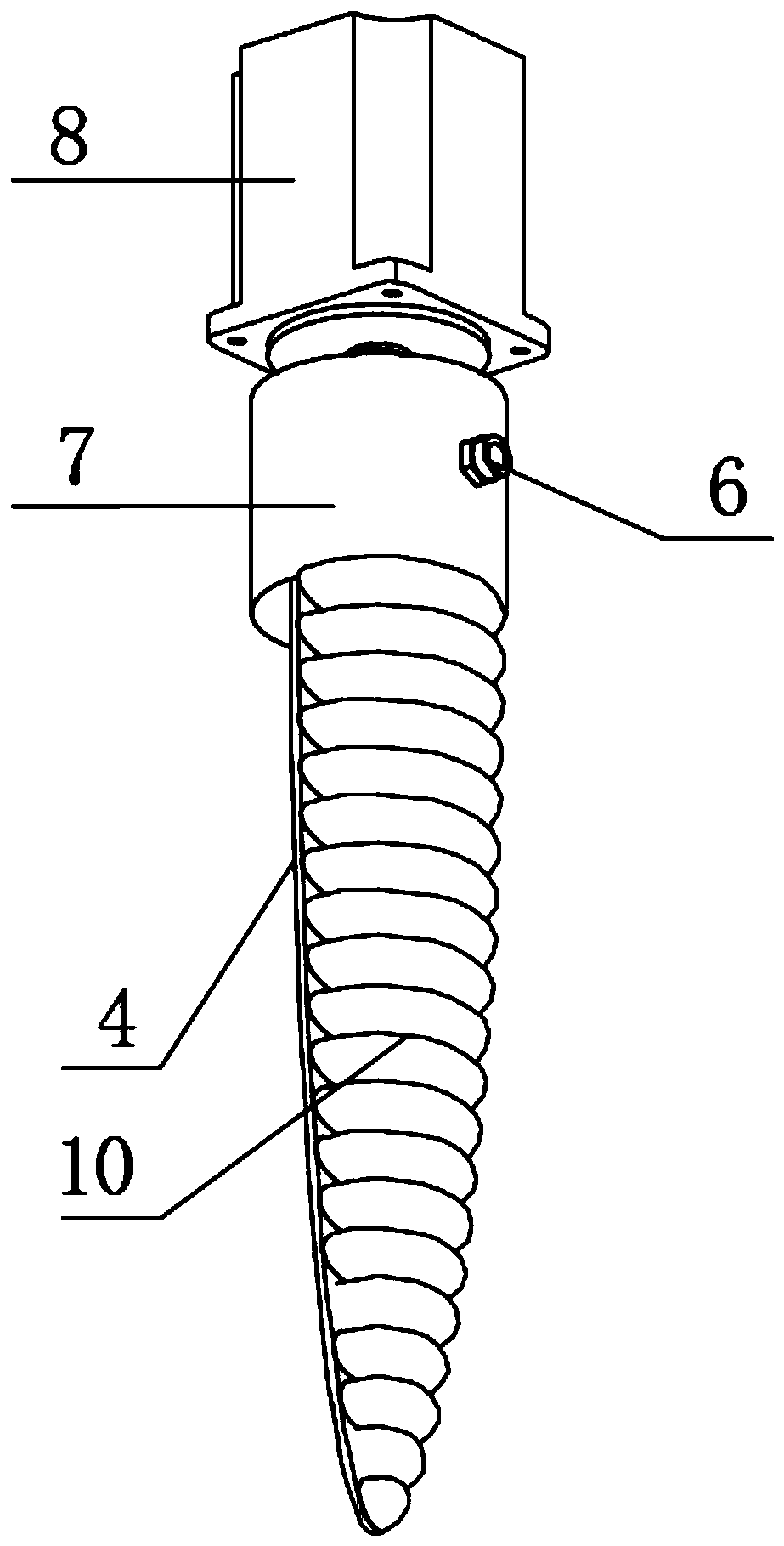
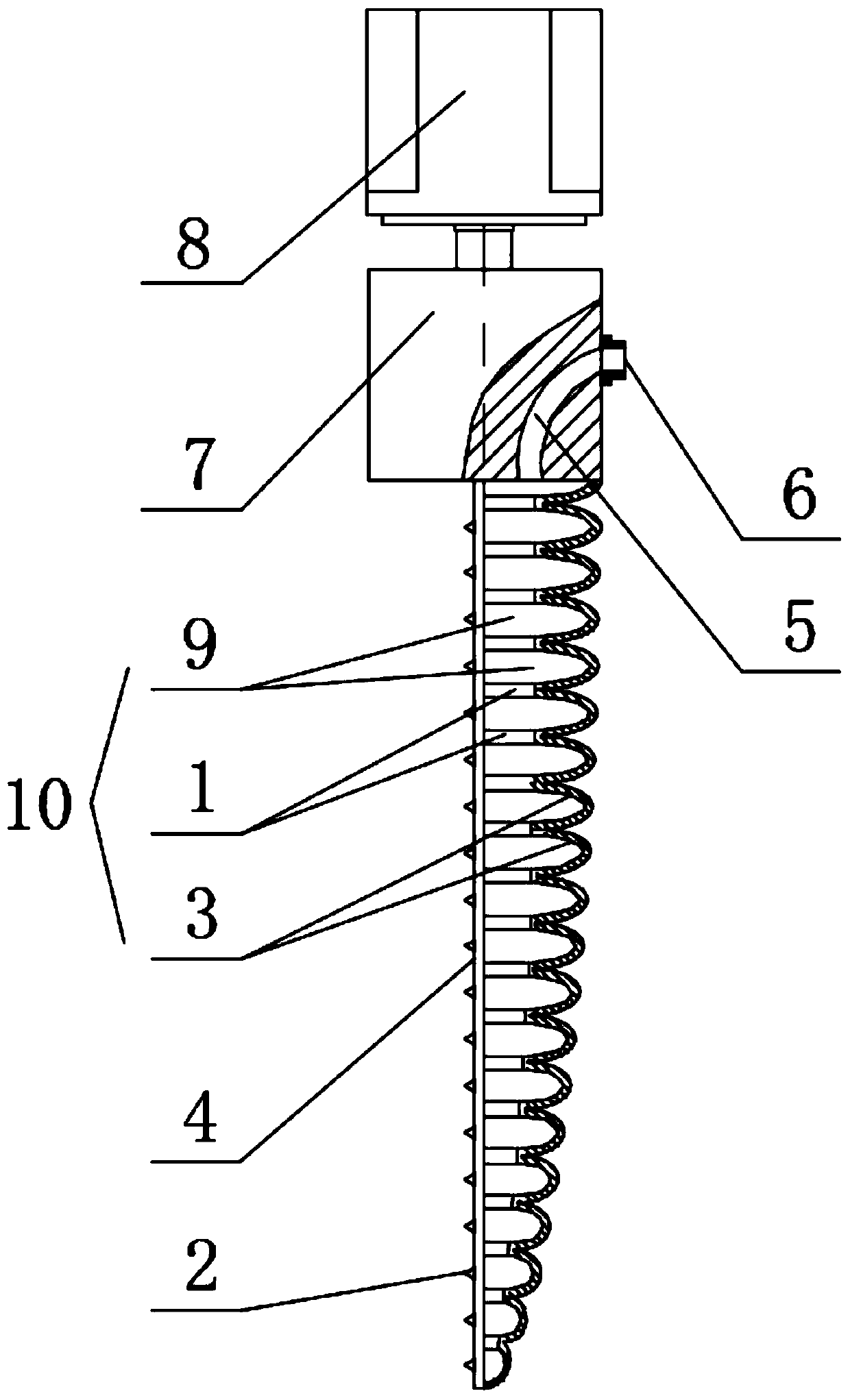
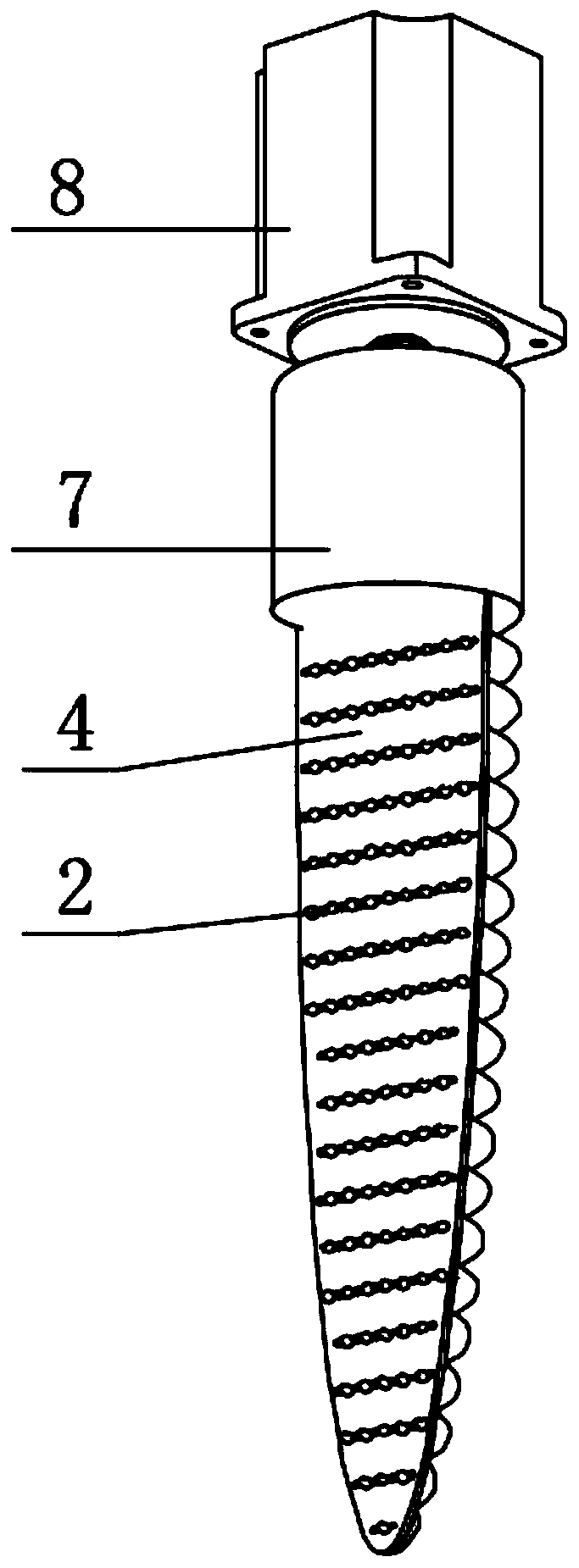
[0021] Such as figure 1 with figure 2 As shown, the flexible gripper with surface microstructure of this embodiment includes a motor 8, and the end of its output shaft is connected with a bending grabbing mechanism through a connecting body 7; One end of 5 communicates with the inflation nozzle 6 arranged on the surface of one side of the connecting body 7, and the other end communicates with the bending grabbing mechanism; The bottom surface is connected, and the bottom end is a free end. An elastic body 10 is connected to one side of the flexible finger fingerboard 4. The elastic body 10 is sequentially connected into a whole by a plurality of interconnected airbags 3 along the length direction. The inside of each airbag 3 It has an inflatable cavity 9, and the inflatable cavities 9 of two adjacent airbags 3 are connected through the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More