

Laser SLAM map method based on multi-robot cooperation
A multi-robot and mobile robot technology, applied in instruments, image enhancement, image analysis, etc., can solve the problems of map storage, limited communication range, map fusion, etc., so as to reduce the amount of calculation and storage, and reduce the cost of software and hardware. , to ensure the desired effect of extraction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0033] The present invention will be further described below in combination with specific embodiments and accompanying drawings.
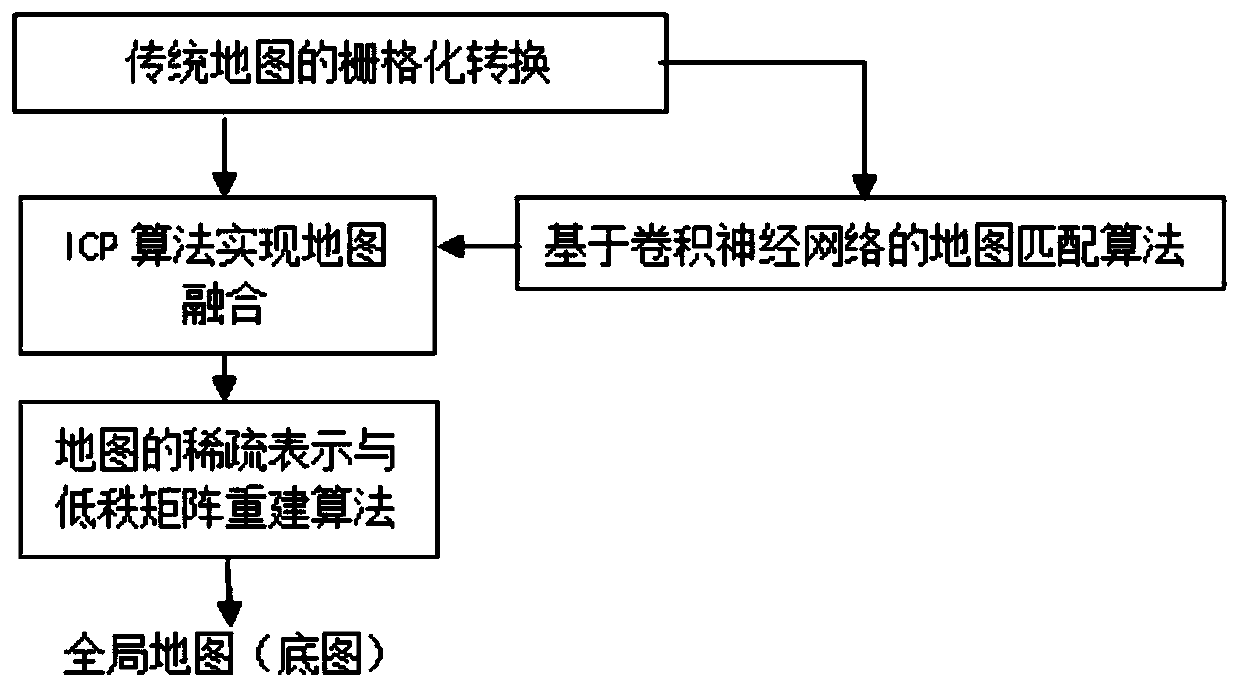
[0034] Such as Figure 1 to Figure 4 As shown, a laser SLAM map method based on multi-robot collaboration, this method uses relatively mature 2DSLAM technology and improved image Registration technology, map compression and extraction technology, and convolutional neural network point cloud registration algorithm realize the splicing and splitting of 2DSLAM maps, and ensure the positioning and navigation of multiple robots on the map. Through the implementation of this technology, it can provide a new attempt for the productization of multi-robot systems, and at the same time it can lay a foundation and provide a basis for the development of 3DSLAM technology. The concrete steps of its technology are as follows (as figure 1 shown):
[0035] Step 1. Rasterize the SLAM map;
[0036] Step 2. The grid map stitching problem is represented by the mi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More