

Satellite positioning method and device and computer readable storage medium
A satellite positioning device and satellite positioning technology, applied in the field of satellite positioning, can solve the problems of high cost of GNSS receivers, inability to connect GNSS receivers, and inability to reduce cold start time, etc., to achieve the effect of reducing cold start time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] It can be seen in practical applications that, for different application scenarios, the time to first location may include a hot start time, a warm start time, and a cold start time.
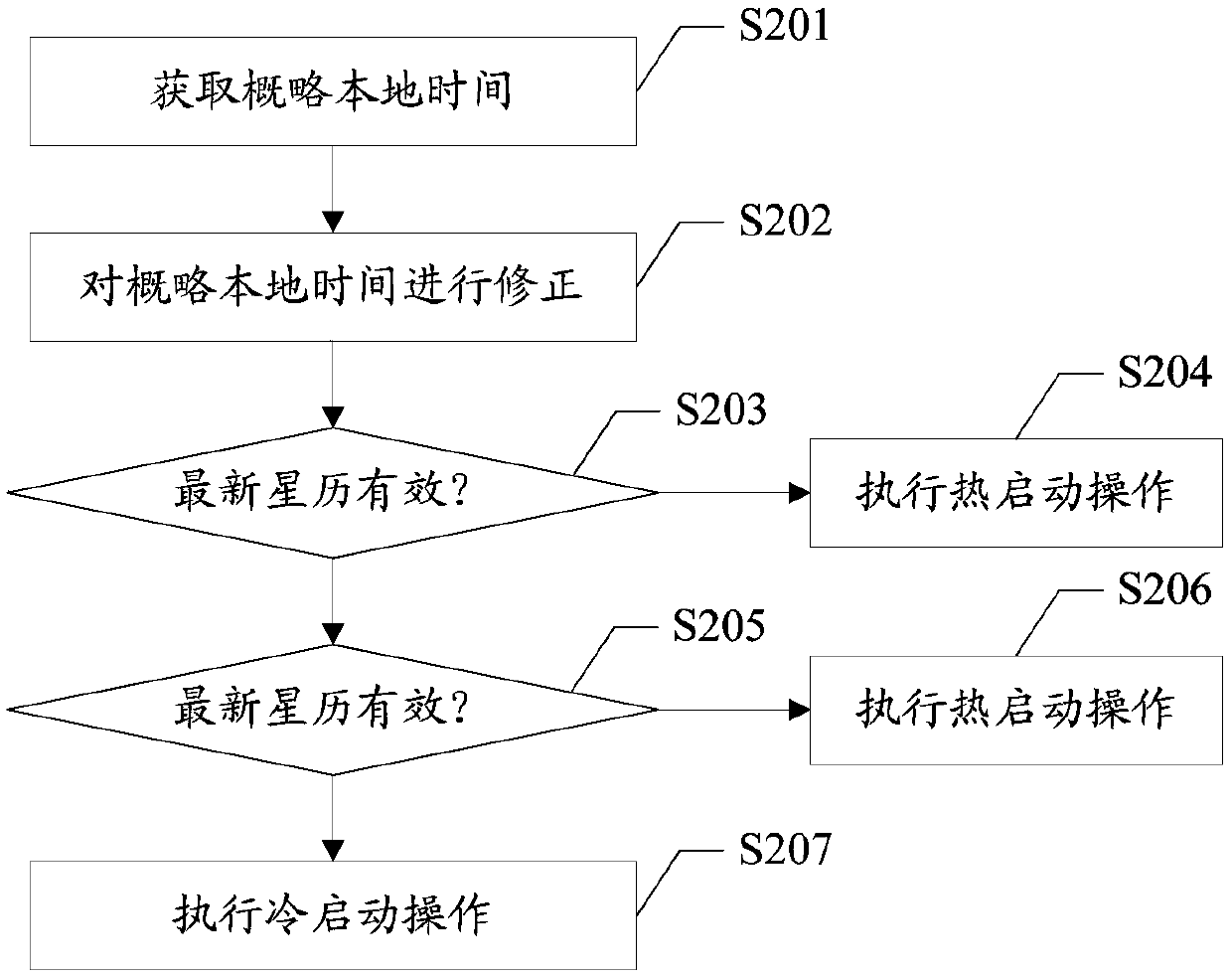
[0027] For hot start, that is, when the GNSS receiver is restarted in a short period of time, the ephemeris, almanac, precise time, and receiver position obtained by the GNSS receiver analysis are all valid, so that the carrier Doppler frequency shift and PN can be calculated Code phase to realize fast recapture and tracking of satellites. At the same time, fast positioning can be realized by calculating the satellite position according to the analyzed ephemeris parameters. Typically, the warm start time for a GNSS receiver is a few seconds.
[0028] For warm start, the ephemeris parameters received by the GNSS receiver have been invalidated, but the parameters such as the almanac and the approximate position of the receiver are still valid. At this time, the approximate position of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More