

Vehicle safety control method based on tire condition information and vehicle
A state information and safety control technology, applied in the field of vehicle safety, can solve problems such as large background noise, large center of gravity deviation, slippage, etc., achieving the effect of small time complexity and space complexity, reducing energy consumption and improving execution efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
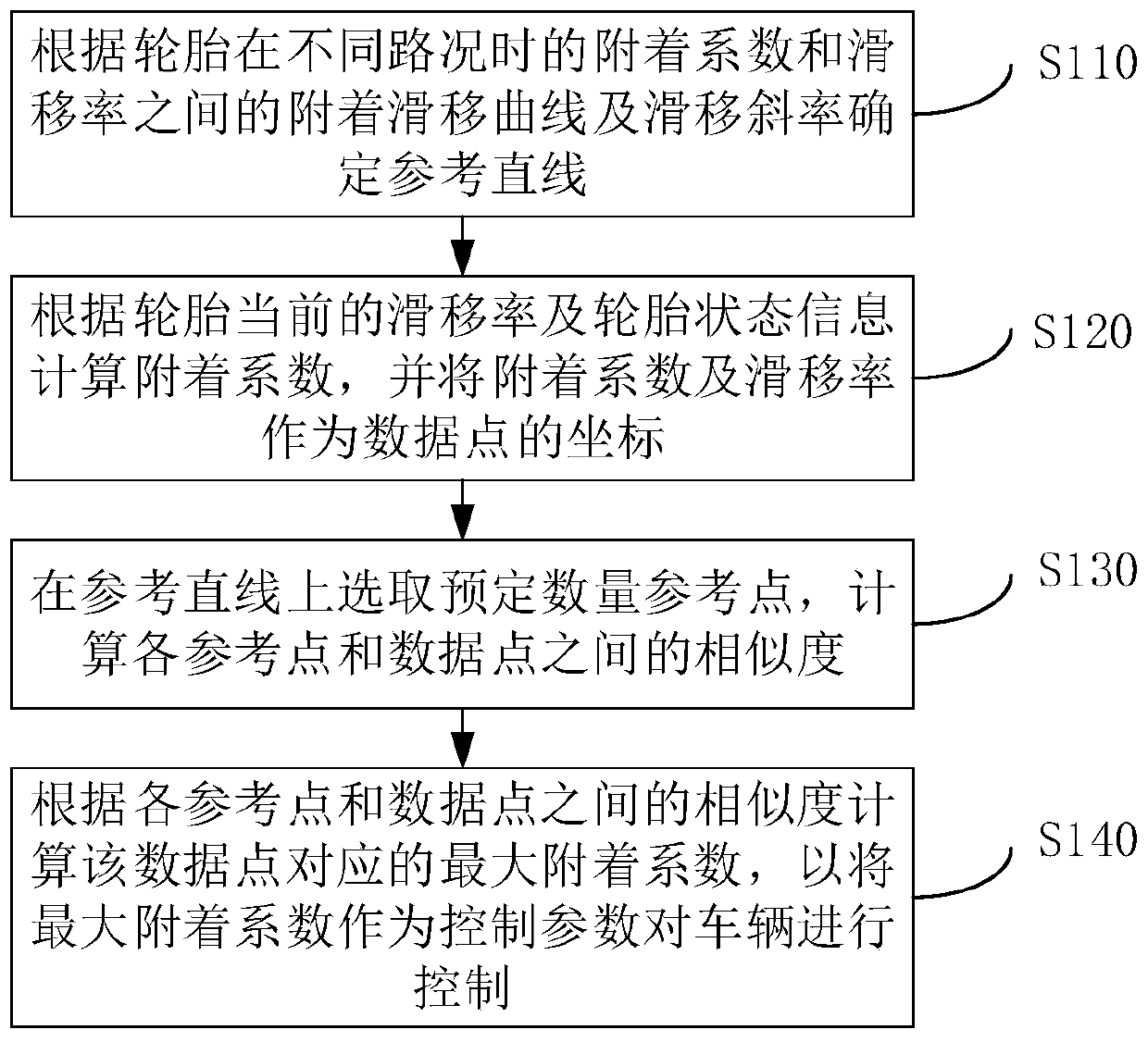
[0060] figure 1 A schematic flowchart of a vehicle safety control method based on tire state information provided by the first embodiment of the present invention is shown. The vehicle safety control method based on tire state information includes:
[0061] Step S110, determining a reference straight line according to the adhesion-slip curve and slip slope between the adhesion coefficient and slip rate of the tire under different road conditions.
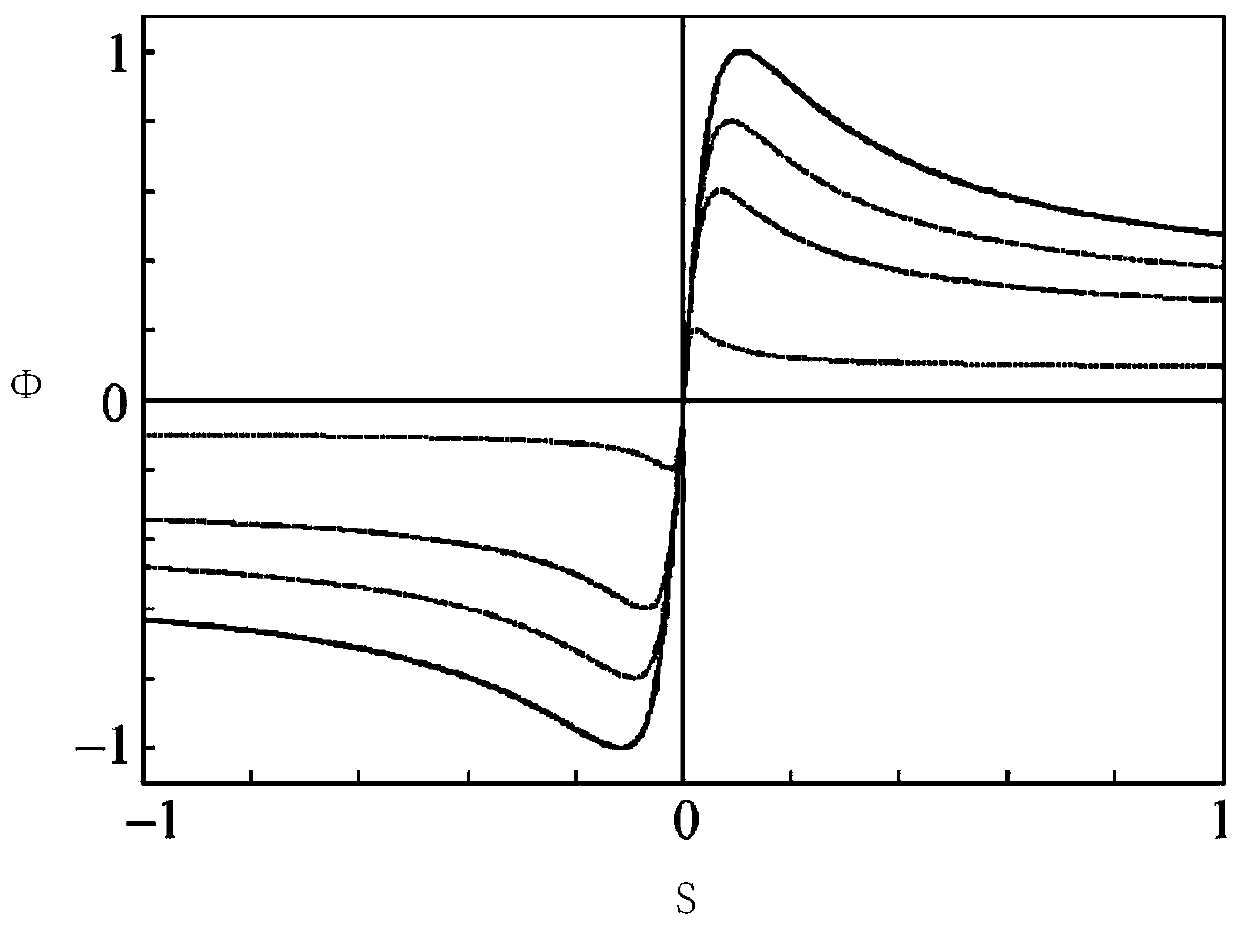
[0062] Specifically, the adhesion coefficient and slip rate of the vehicle under different road conditions can be collected, and the adhesion coefficient and slip rate of each road condition can be fitted into an adhesion-slip curve. Since the adhesion coefficient and slip rate of different road conditions are different, the adhesion-slip curves obtained by fitting different road conditions are also different.
[0063] Such as figure 2 Shown are the adhesion-slip curves of the tire under different road conditions, where Φ is the...
Embodiment 2
[0124] Figure 6 A schematic flowchart of a vehicle safety control method based on tire state information provided by the second embodiment of the present invention is shown. The vehicle safety control method based on tire state information includes the following steps:
[0125] Step S210, determining a reference straight line according to the adhesion-slip curve and slip slope between the adhesion coefficient and slip rate of the tire under different road conditions.
[0126] This step is the same as step S110 and will not be repeated here.
[0127] Step S220, calculating the adhesion coefficient according to the current tire slip ratio and tire state information, and using the adhesion coefficient and slip ratio as the coordinates of the data points.
[0128] This step is the same as step S120 and will not be repeated here.
[0129] Step S230, selecting a predetermined number of reference points on the reference straight line, and calculating the similarity between each r...
Embodiment 3
[0143] Figure 7 A schematic flowchart of a vehicle safety control method based on tire state information provided by the third embodiment of the present invention is shown. The vehicle safety control method based on tire state information includes the following steps:
[0144] Step 310, determining a reference straight line according to the adhesion-slip curve and slip slope between the adhesion coefficient and slip rate of the tire under different road conditions.
[0145] This step is the same as step S110 and will not be repeated here.
[0146] Step 320, calculating the adhesion coefficient according to the current tire slip ratio and tire state information, and using the adhesion coefficient and slip ratio as the coordinates of the data points.
[0147] This step is the same as step S120 and will not be repeated here.
[0148] Step S330, selecting a predetermined number of reference points on the reference straight line, and calculating the similarity between each refe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More