

A Method for Determining Vehicle Trajectory Tracking Points Based on Preview
A technology of vehicle trajectory and determination method, which is applied to ground navigation, navigation through speed/acceleration measurement, etc., can solve the problems of complex calculation process and inaccurate calculation results, and achieve the effect of simple principle and fast and accurate calculation process.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be described in further detail below in conjunction with the accompanying drawings.
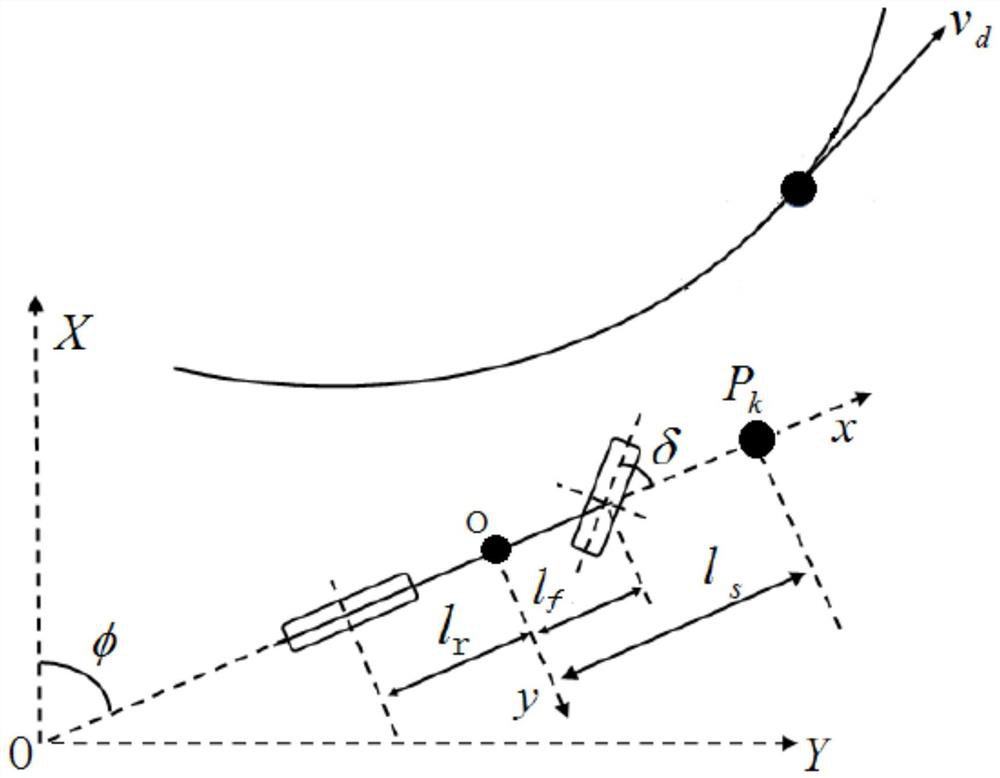
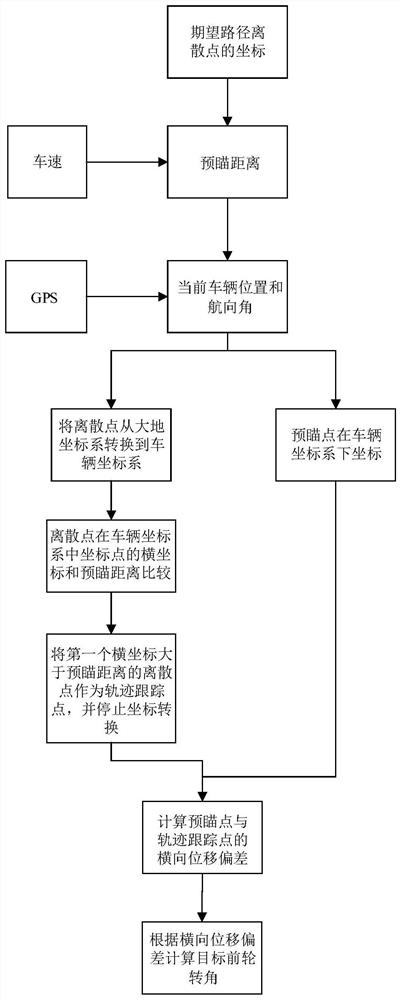
[0034] The invention converts the discrete points on the expected path in the earth coordinate system into the vehicle coordinate system according to the kinematic relationship, and at the same time compares the distance between the converted discrete points to the vehicle and the preview distance, and can quickly obtain the track tracking according to the difference point, so as to realize the trajectory tracking of intelligent vehicles.
[0035] There are multiple embodiments about the structure of the coordinate system in the present invention, so the embodiments of the present invention also have multiple forms, a specific embodiment is provided below, the process of comparing differences in this embodiment is to convert it into the vehicle coordinate system The abscissa of the discrete point is compared with the preview distance, and the discrete point i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More