

Output feedback trajectory tracking control method with predetermined performance and dead zone input constraint for electromechanical system
An electromechanical system and output feedback technology, applied in non-electric variable control, two-dimensional position/channel control, control/regulation system, etc., can solve the problems of difficult measurement of system state, system transient performance, etc., to solve the system state Effects of unknown and system transient, trajectory tracking, fast convergence rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
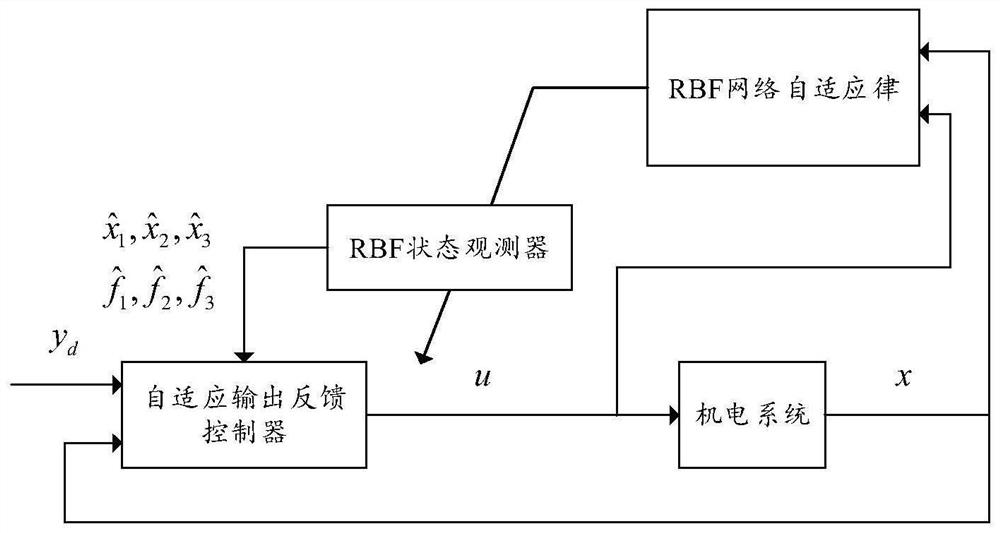
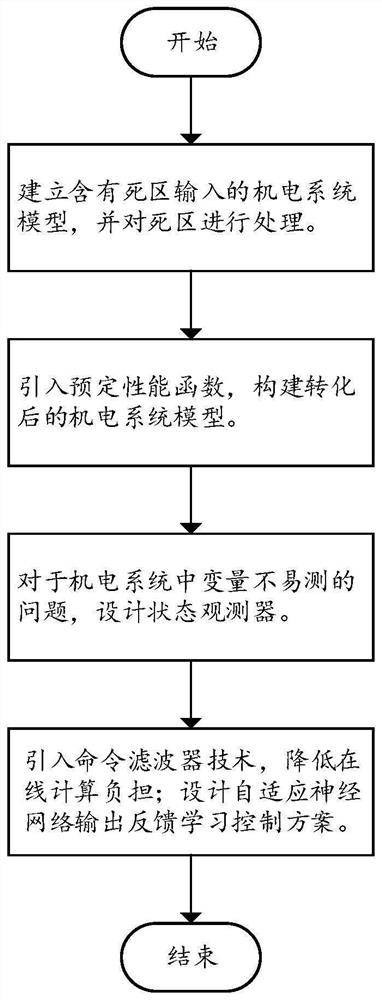
[0124] Such as figure 1 Shown, the concrete steps of the present invention are as follows:
[0125] The first step is to establish a physical model of the electromechanical system with a dead zone input, linearize the dead zone model, and give a reference tracking trajectory.
[0126]
[0127] Among them, q, Respectively expressed as the motor angular position, angular velocity, angular acceleration. I represents the motor current, V 0 Indicates the input voltage. N=mG0 g / (2K τ )+W 0 G 0 g / K τ , B=B 0 / K τ . The parameters in the electromechanical system model are shown in Table 1. in, and is bounded, its supremum satisfies Obtained from (2), (3), the model can be transformed into
[0128] u=Π(υ(t))=H T (t)γ(t)υ(t)+d(υ(t))=F(t)υ(t)+d(υ(t)) (4) Introduce state variable x 1 ,x 2 ,x 3 , so that x 1 =q is the angular position of the motor, is the motor angular velocity, x 3 = I is the motor current, the system (1) can be transformed into
[0129] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More