

Color three-dimensional imaging system based on three cameras and calibration method thereof
A technology of three-dimensional imaging and calibration method, applied in the field of three-dimensional measurement, can solve the problems of low accuracy, large error of calibration results, and no consideration of errors, and achieve the effect of improving the accuracy of calibration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] In order to make the object, technical solution and beneficial technical effects of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the specific implementations described in this specification are only for explaining the present invention, not for limiting the present invention.
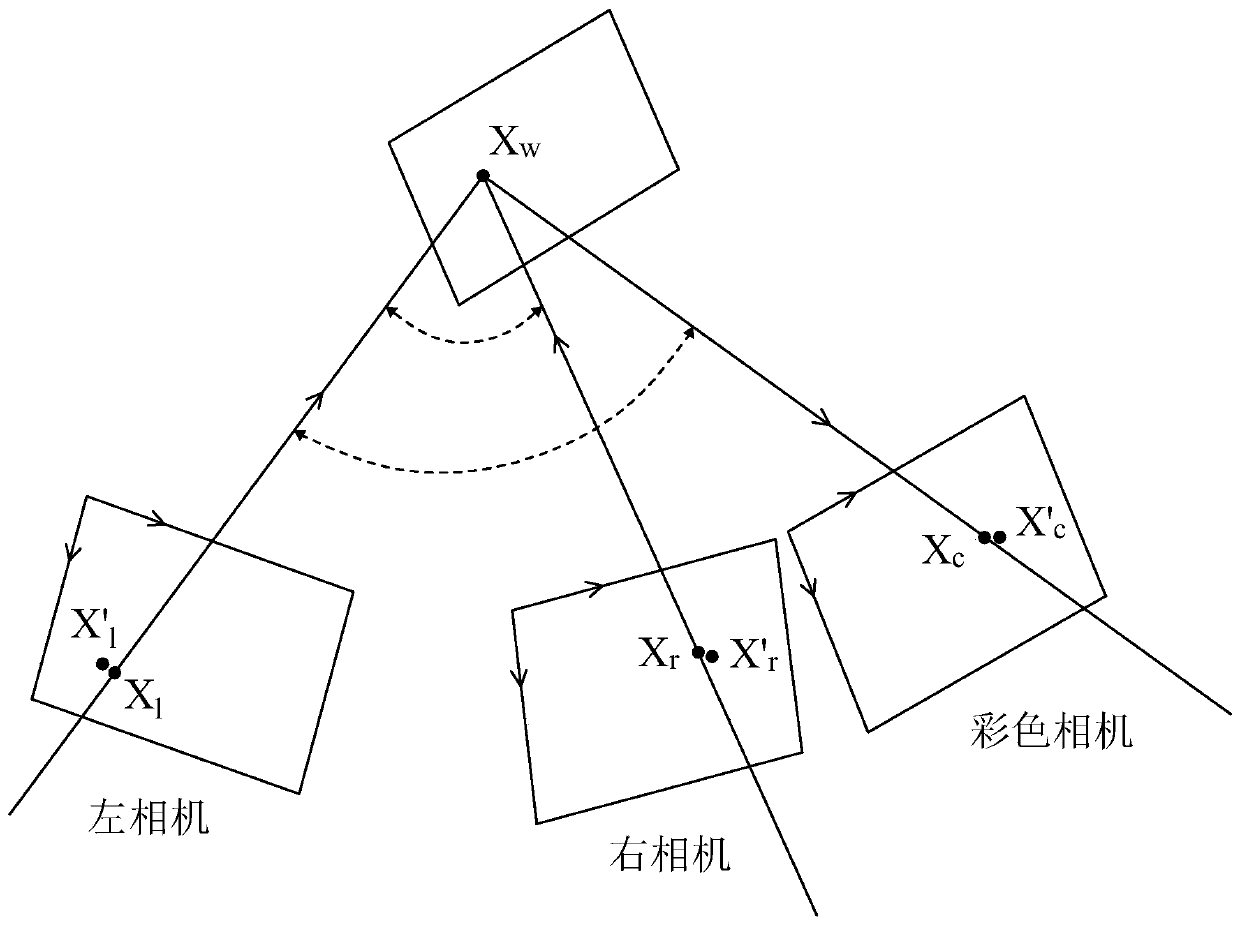
[0044] Such as figure 1As shown, the color 3D imaging system based on three cameras includes two grayscale cameras and one color camera, wherein the two grayscale cameras consist of a left camera and a right camera. Specifically, the left camera and the right camera are separated by a certain distance to form a binocular stereo vision system. The left camera and the right camera are used to collect the grayscale image containing the target. There are multiple mark points on the target, and the color camera is used to collect The color image contai...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More