

Unmanned aerial vehicle static and dynamic path planning method based on digital map
A digital map and dynamic path technology, applied in the direction of navigation calculation tools, etc., can solve the problems of high flight requirements, large amount of data calculation, and poor maneuverability of UAVs.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0089] In order to make the purpose, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments. The specific embodiments described here are only used to explain the present invention, not to limit the present invention.
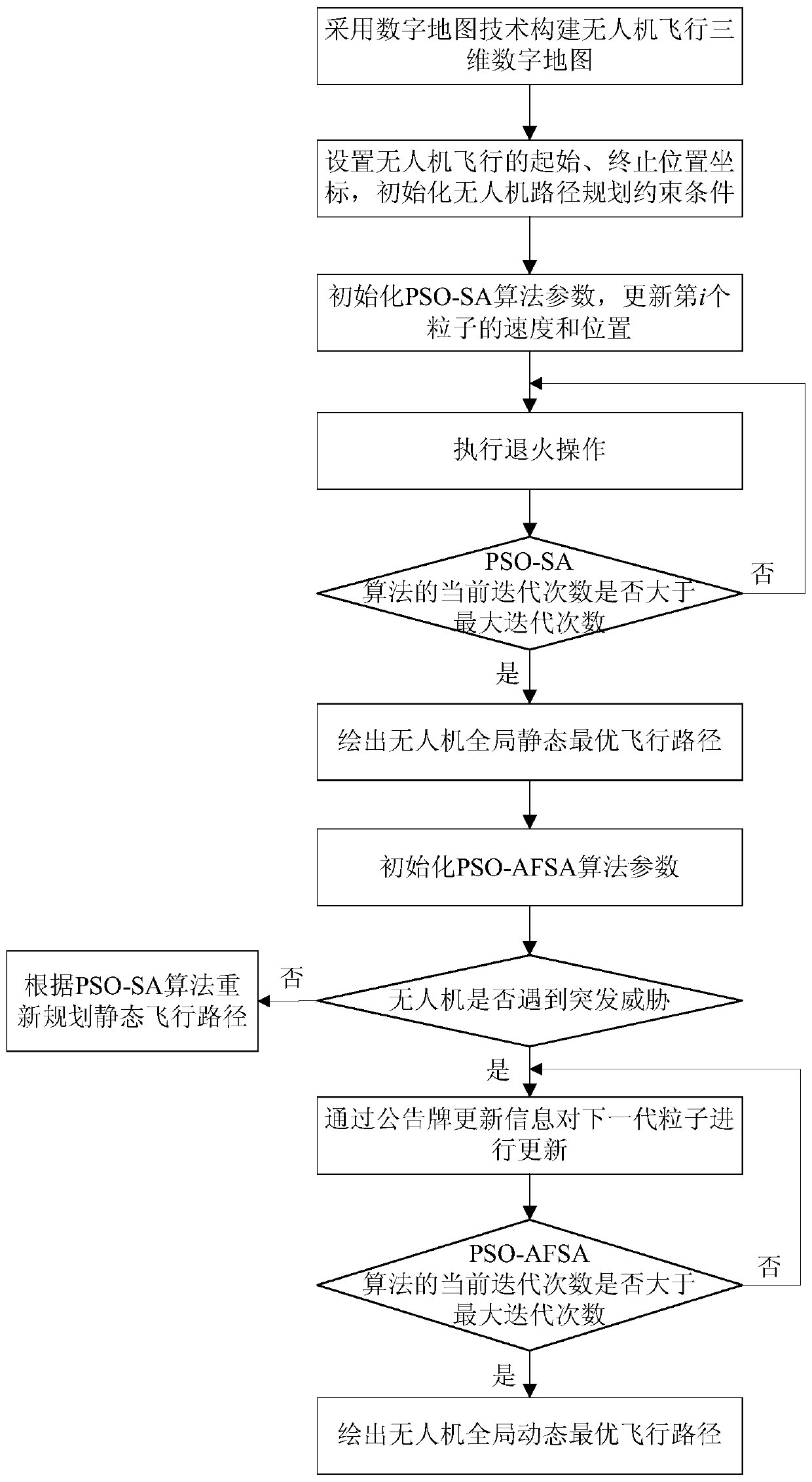
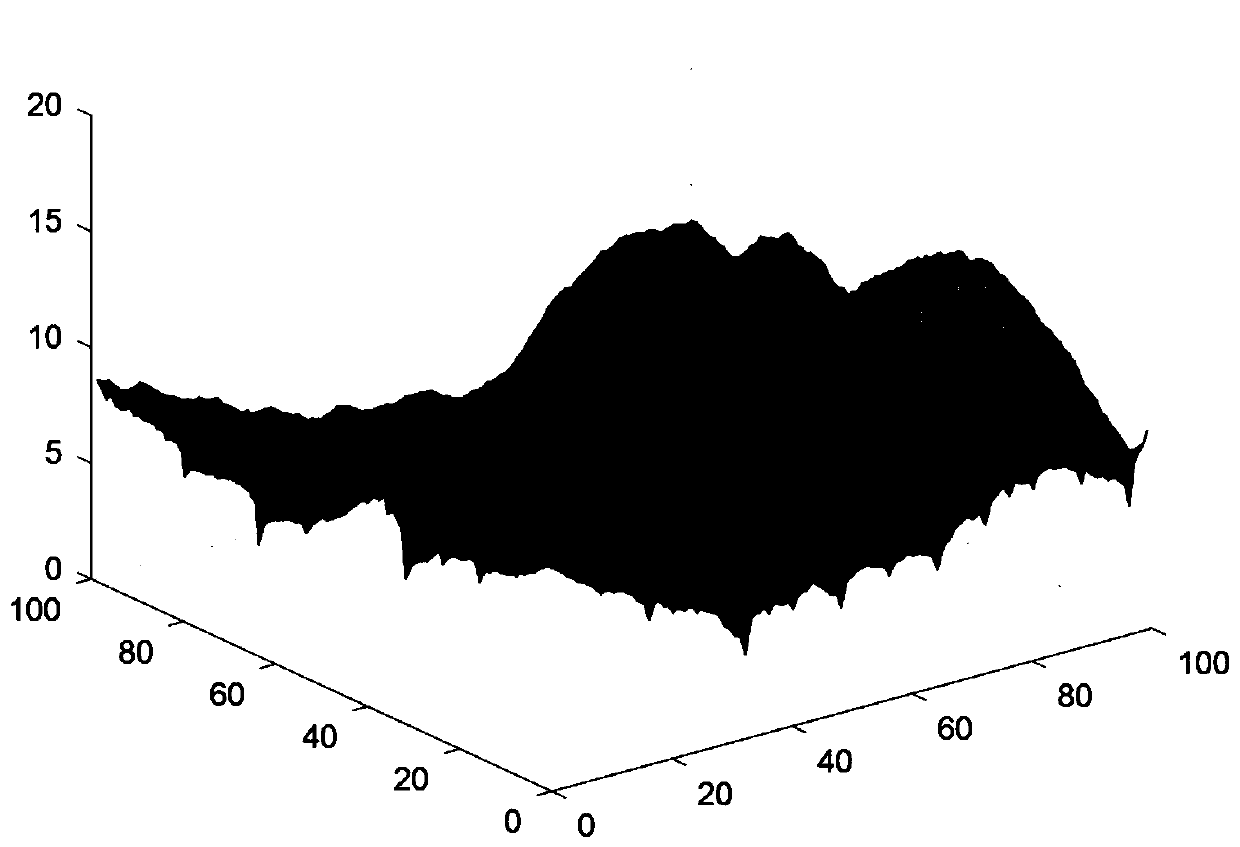
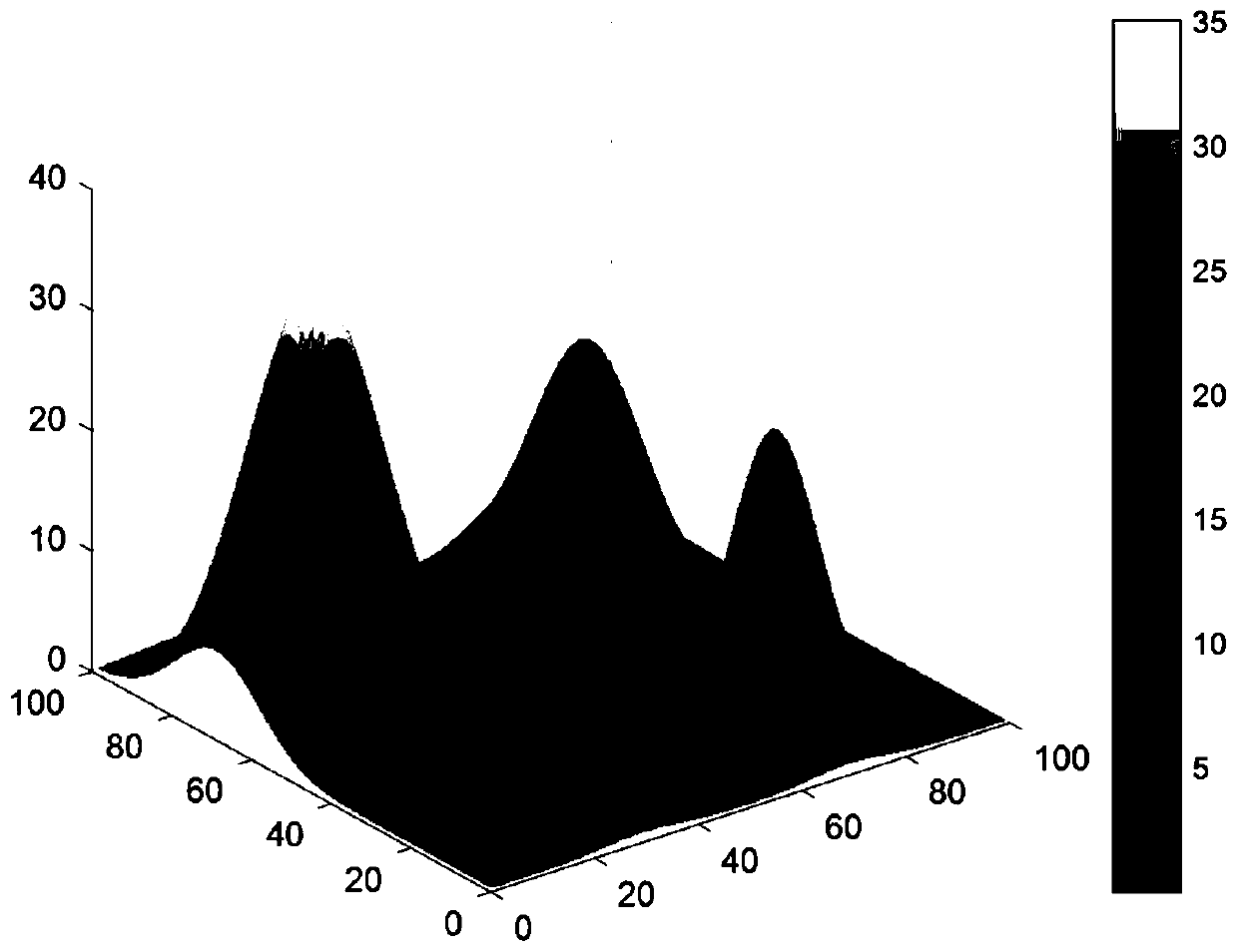
[0090] Based on the three-dimensional digital map, this embodiment provides a static and dynamic path planning method for the UAV based on the digital map. In the static situation, firstly, the three-dimensional environment for the flight of the UAV is constructed through the digital map technology, and the starting position of the flight is set. Then use the PSO-SA algorithm that introduces the SA jump probability strategy for path planning, determine the flight cost through the flight constraints of the UAV, and draw the global static flight route of the UAV on the basis of satisfying the end conditions of the algor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More