

Aggregated-distributed control method of multi-unmanned-aerial-vehicle task area
A distributed control and multi-UAV technology, which is applied in the field of multi-UAV mission area to gather distributed control, can solve the problems of speed and heading angle that cannot be converged, and achieve high reliability, small amount of calculation, and small amount of communication Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] Below in conjunction with accompanying drawing and embodiment the present invention will be further described:
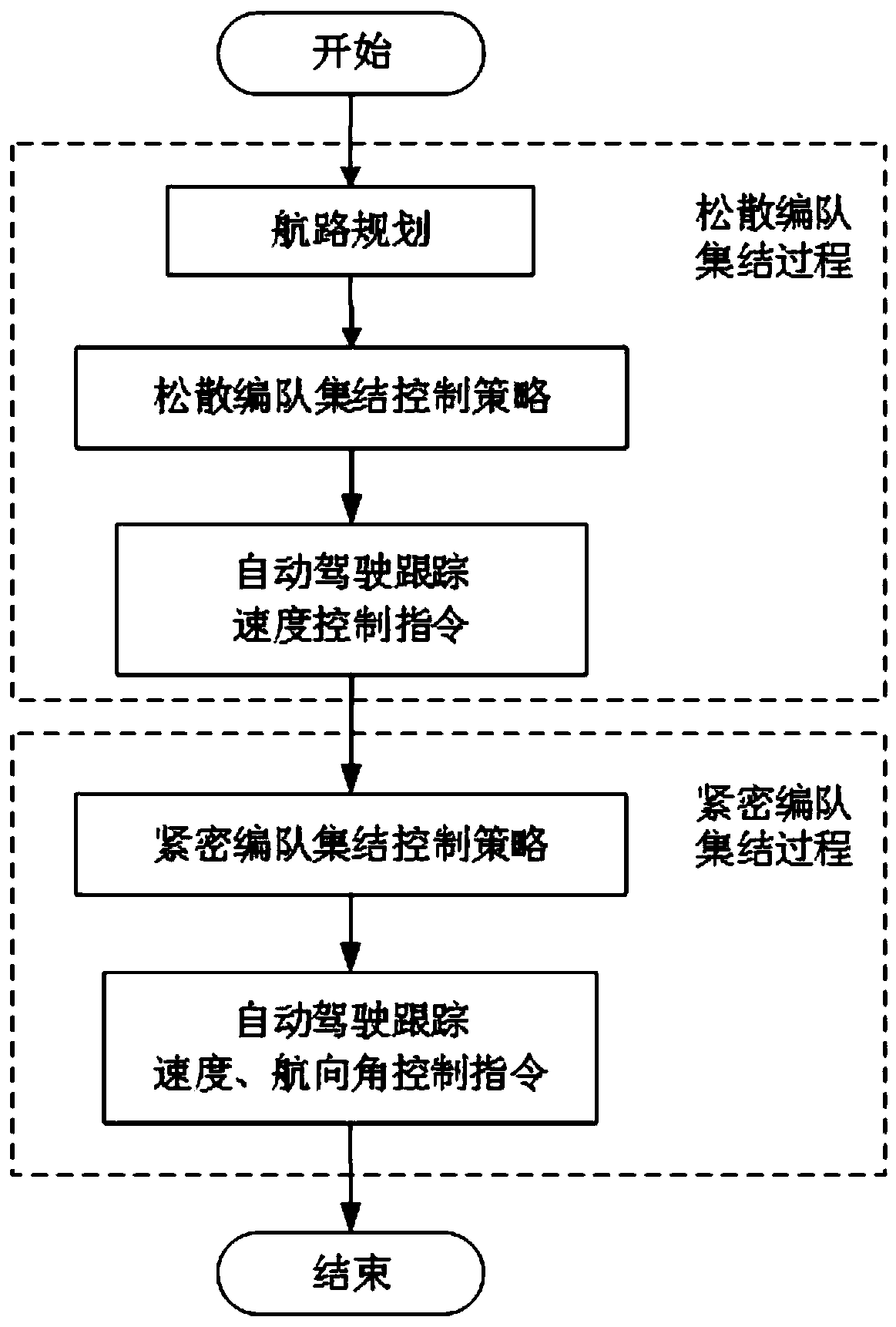
[0034] The invention proposes a control method for realizing the assembly of multiple unmanned aerial vehicle mission areas under the condition of distributed communication. This method divides the assembly process into loose formation assembly and tight formation assembly. The loose formation assembly stage completes the traditional assembly task goal, that is, arrives at the designated assembly point at the same time. Aiming at this goal, a loose formation assembly control based on the first-order consensus algorithm is proposed. In the stage of tight formation assembly, the transition from loose formation to tight formation is completed, and the speed and heading angle of each UAV are reached. Aiming at this goal, a tight formation assembly control strategy based on the second-order consensus algorithm is proposed . In addition, on the basis of the design...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More