
Eureka
For R&D, Eureka makes reading and utilizing patents & technical documents easy.
Eureka AIR
Designed for self-driven R&D workflows. Generate viable solutions, solve complex R&D challenges, empower your innovation with AI.

Eureka Materials
Designed for material experts only. Revolutionize your material R&D, from search, analyze, to developing new materials.

TechResearch
Generate reliable direction feasibility study reports for your R&D in just a few steps.

TechSeek
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

TechMind
As an expert in R&D Theories, TechMind can generates customized viable solutions instantly.

TechRisk
Analyze your overall solution with one click, know your potential R&D risks in advance.

TechMonitor
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
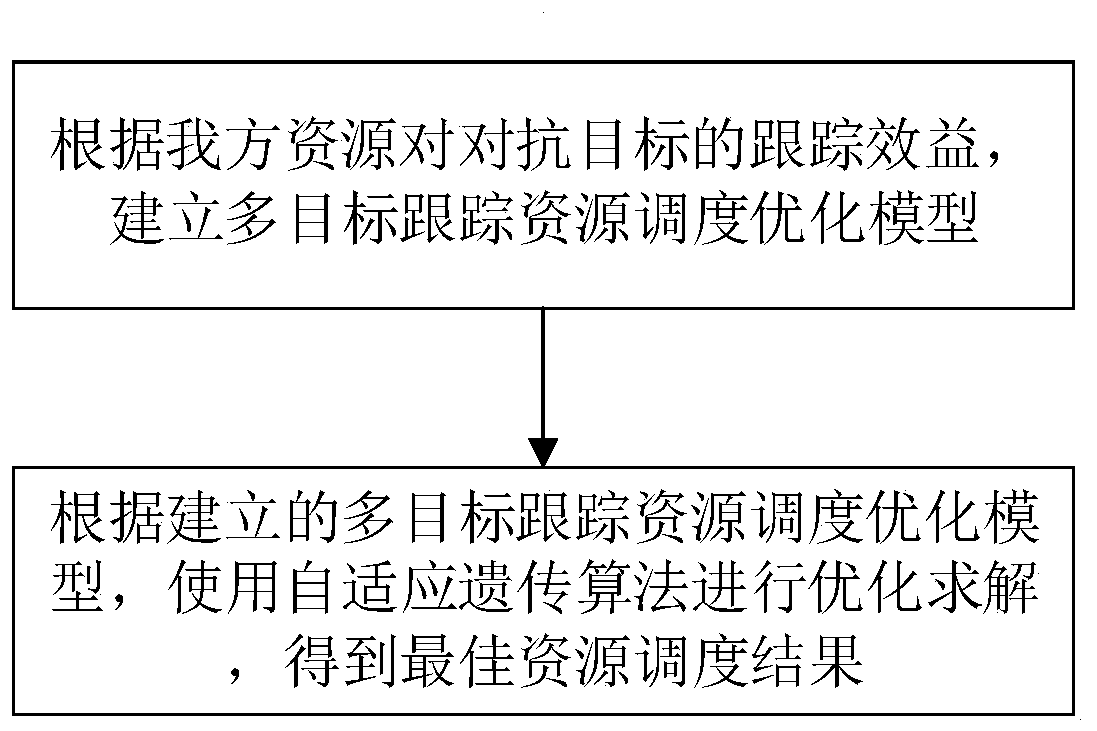
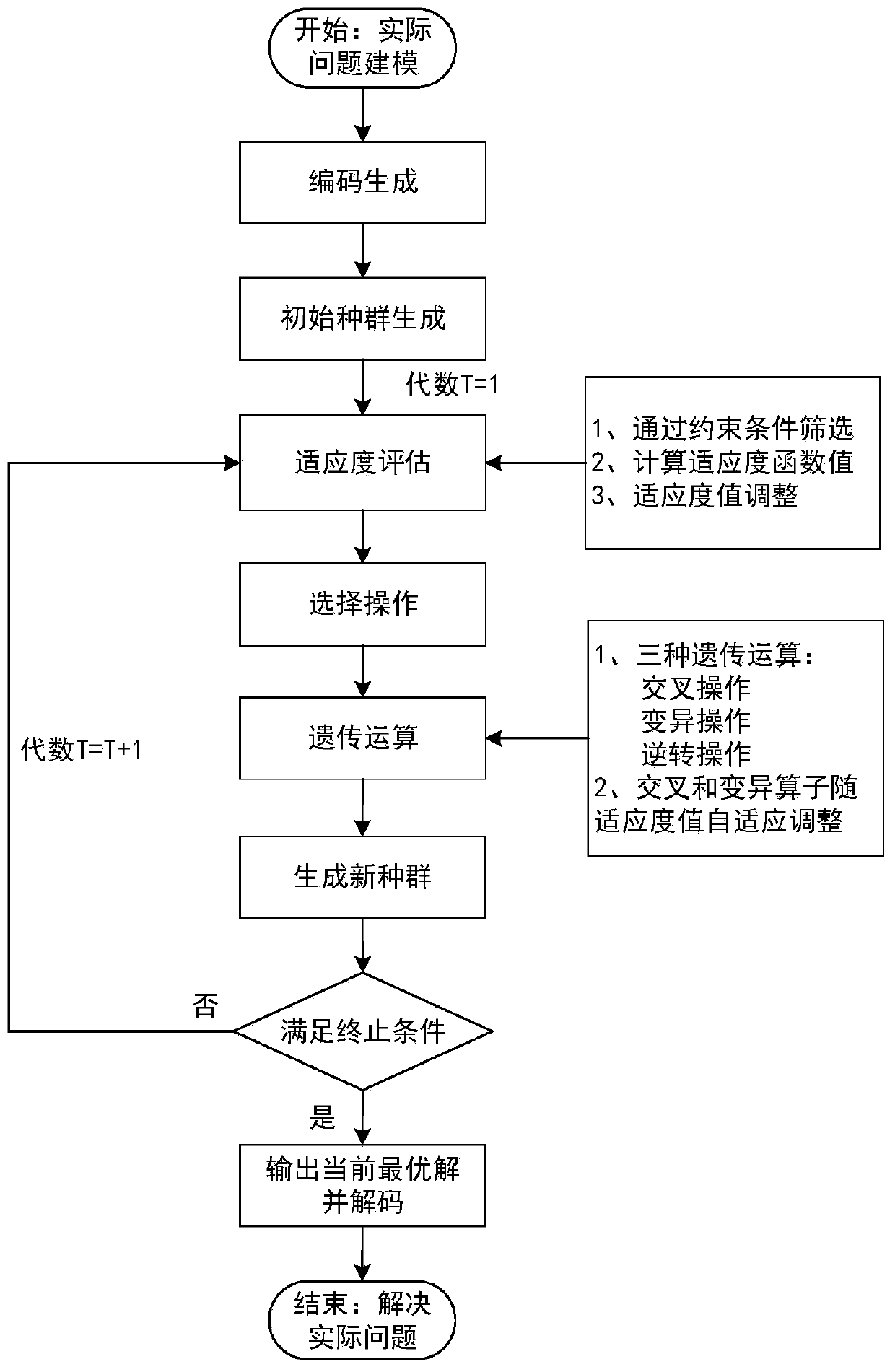
Multi-target tracking resource scheduling method based on adaptive genetic algorithm
A multi-target tracking and resource scheduling technology, applied in the fields of genetic law, resources, computing, etc., can solve problems such as long solution time, poor adaptability, and inability to realize a resource, so as to improve convergence accuracy, improve adaptability, and shorten the solution time. effect of time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
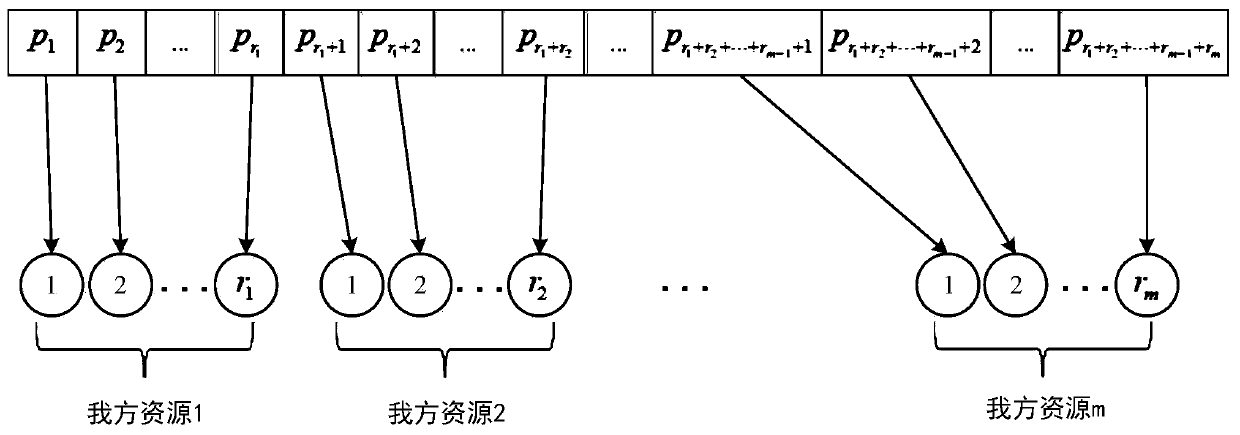
[0108] This embodiment provides a multi-target tracking resource scheduling method based on an adaptive genetic algorithm. First, multiple resources and multiple confrontation targets are respectively numbered, assuming that there are 8 our resources whose numbers are {1, 2, 3 ,4,5,6,7,8}, set the function matching parameter F of our resources i They are {0.2, 0.9, 0.7, 0.6, 0.5, 0.8, 0.75, 0.85}; the numbers of the 6 confrontation targets are {1, 2, 3, 4, 5, 6}, and the threat levels ω of the confrontation targets are { 0.7, 0.95, 0.6, 0.5, 0.9, 0.8}, track 6 confrontation targets through 8 our resources; among them, the two-dimensional position coordinates of each of our resources are shown in Table 1.
[0109] Table 1:
[0110] Our resource number 1 2 3 4 5 6 7 8 X coordinate (km) 16.47 60.09 80.23 100.47 120.30 150.53 90.41 30.41 Y coordinate (km) 96.10 92.54 97.24 98.02 99.38 93.38 97.13 87.31
[0111] The multi-target trac...
Embodiment 2
[0131] This embodiment further verifies the effectiveness of the present invention. The number of confrontation targets is set to 8, and the threat levels ω of the targets are respectively {0.7, 0.95, 0.6, 0.5, 0.9, 0.8, 0.75, 0.4}, and other conditions remain constant.
[0132] Also according to the above process, the best resource scheduling result is 8452314831526776, and the average time is 0.858s, which is converted into the actual scheduling result through decoding, as shown in Table 3.
[0133] Table 3, the optimal scheduling results of 8 our resources against 8 confrontation targets:
[0134]
[0135]
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com