

Self-adaption fuzzy neural compensating nonsingular terminal sliding mode control method of micro gyroscope
A non-singular terminal, self-adaptive fuzzy technology, applied in the direction of self-adaptive control, general control system, control/regulation system, etc., can solve problems such as vibration, achieve the effect of improving reliability and ensuring global progressive stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The above description is only an overview of the present invention. In order to understand the technical means of the present invention more clearly and implement it according to the contents of the specification, the following describes the self-control of the micro gyroscope according to the present invention in conjunction with the accompanying drawings and preferred embodiments. The non-singular terminal sliding mode control method adapted to fuzzy neural compensation is described in detail.
[0047] The present invention is achieved in the following ways:
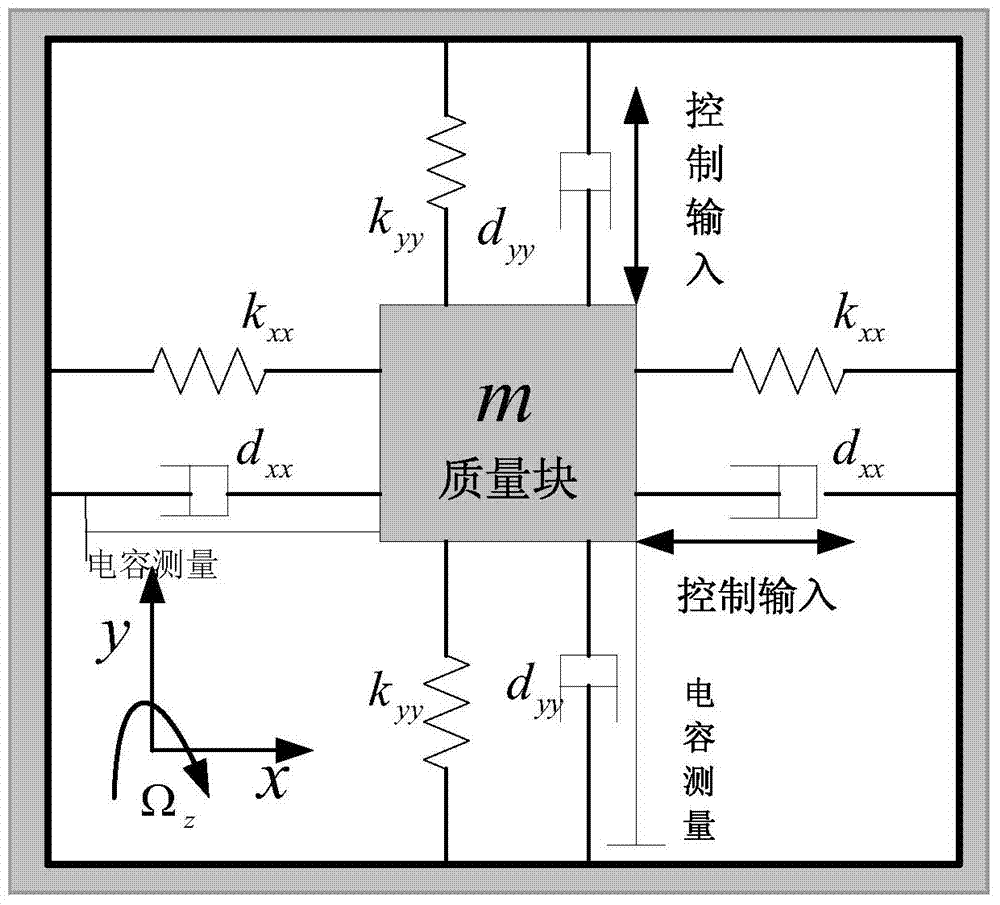
[0048] 1. Constructing the mathematical model of the micro-gyroscope system
[0049] Such as figure 1 As shown, according to Newton's law in the rotating system, considering manufacturing defects and processing errors, and then through the dimensionless processing of the model, the lumped parameter mathematical model of the actual micro gyroscope is obtained as:
[0050] q ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More