

Robot teaching system and method of three-dimensional force sensor
A teaching method and three-dimensional force technology, applied in the field of robotics, can solve the problems of large deviation of three-dimensional force acquisition data, reduce the accuracy of data monitoring, and reduce the effect of the teaching system, so as to compensate for individual differences, reduce uncertainty, The effect of flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] In order to further understand the content, features and effects of the present invention, the following examples are given, and detailed descriptions are given below with reference to the accompanying drawings.
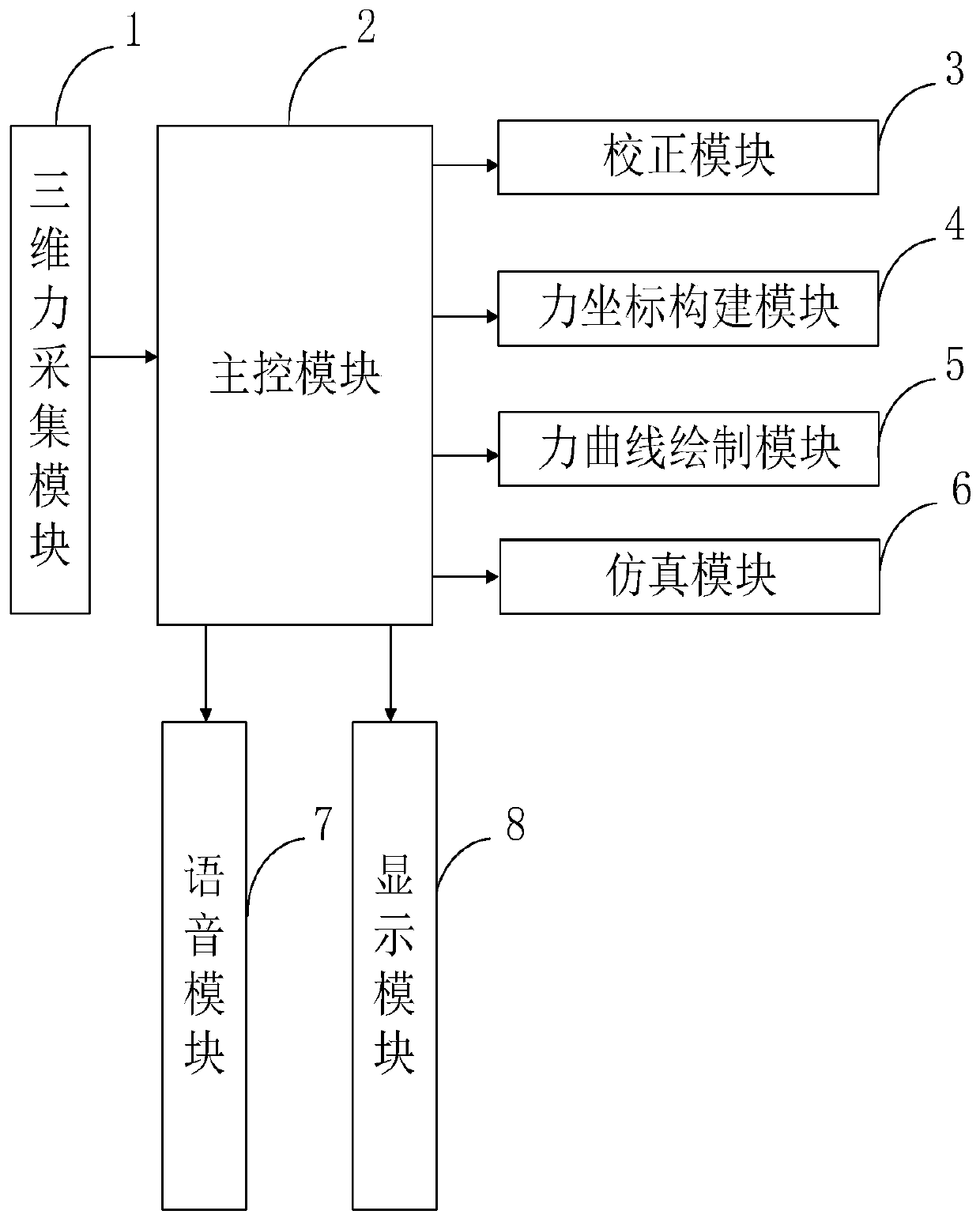
[0057] In the robot teaching process of the existing three-dimensional force sensor, there is a large deviation in the collected data of the three-dimensional force, and the simulation accuracy is poor. The force sensor in the existing three-dimensional force sensor robot teaching system is easily affected by temperature, which reduces the accuracy of data monitoring. In the existing robot teaching system of the three-dimensional force sensor, when drawing an image according to the collected data, a static method is used for drawing, which reduces the accuracy of the drawn graph, thereby reducing the effect of the teaching system.
[0058] In order to solve the above problems, the structure of the present invention will be described in detail below in conjunct...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More