

Automatic driving environment perception-oriented small sample in-loop learning system and method
A self-driving and environment-aware technology, applied in the field of small-sample in-the-loop learning systems, can solve the problems of unavailable data, difficulty in labeling, and high cost of data labeling for self-driving companies, so as to increase the depth of information, improve perception and cognition horizontal effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0098] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below through the accompanying drawings and embodiments. However, it should be understood that the specific embodiments described here are only used to explain the present invention, and are not intended to limit the scope of the present invention.
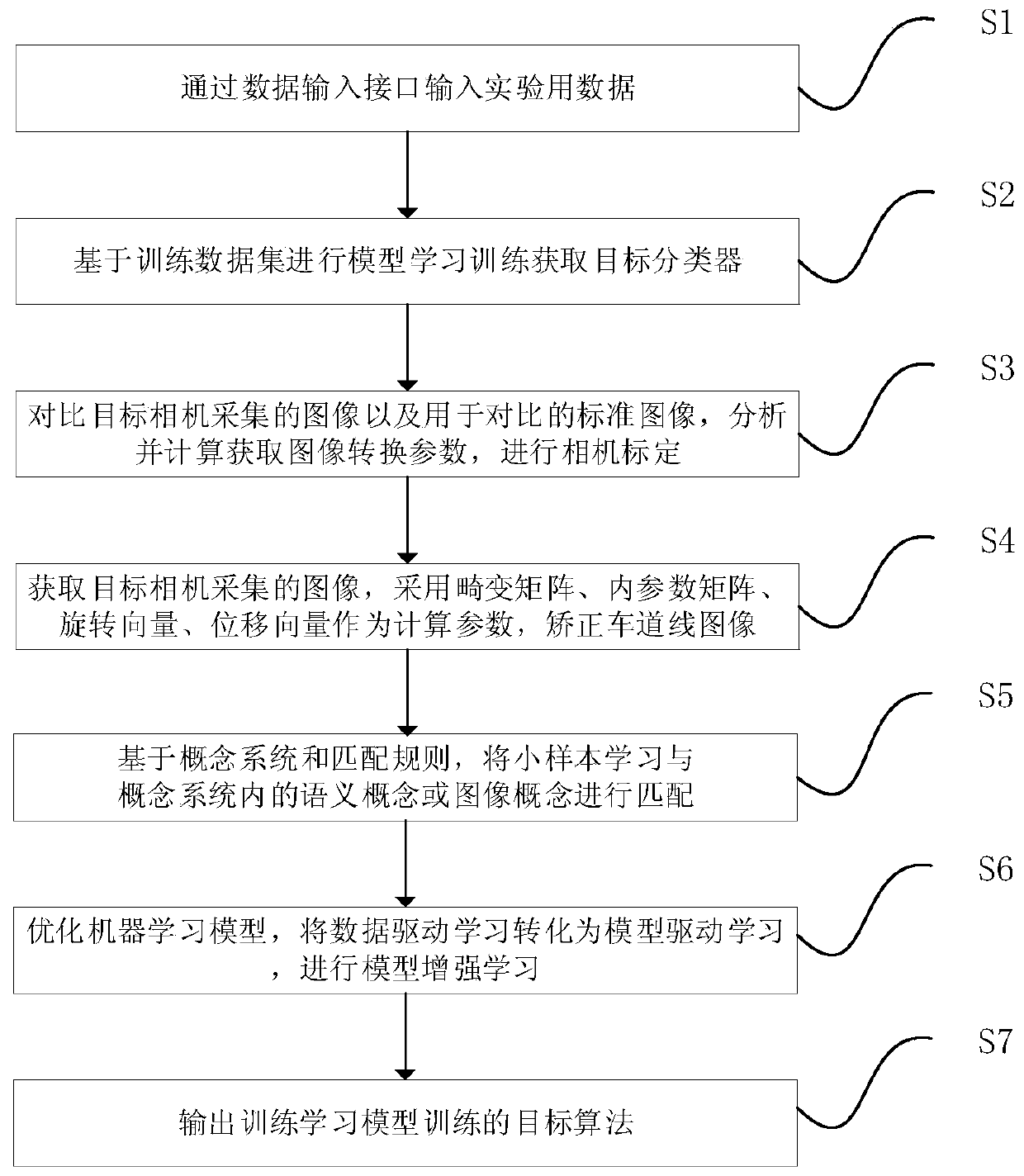
[0099] Such as Figure 1-6 As shown, this embodiment provides a small-sample-in-the-loop learning system for autonomous driving environment perception. The system performs algorithm training on the target learning model based on the data training set, obtains the target detection algorithm, and performs small-sample learning in the physical ECU module. The training set is trained and studied, the target perception algorithm is obtained, and the target algorithm test of the system is performed through the obtained target detection algorithm and target perception algorithm,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More