

Predetermined time multi-agent system consistency tracking control method
A multi-agent system, tracking control technology, applied in the direction of using feedback control, etc., can solve the problem that no literature has proposed a predetermined time consistency control protocol, and achieve the effect of reducing conservatism, improving flexibility, and low conservatism
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
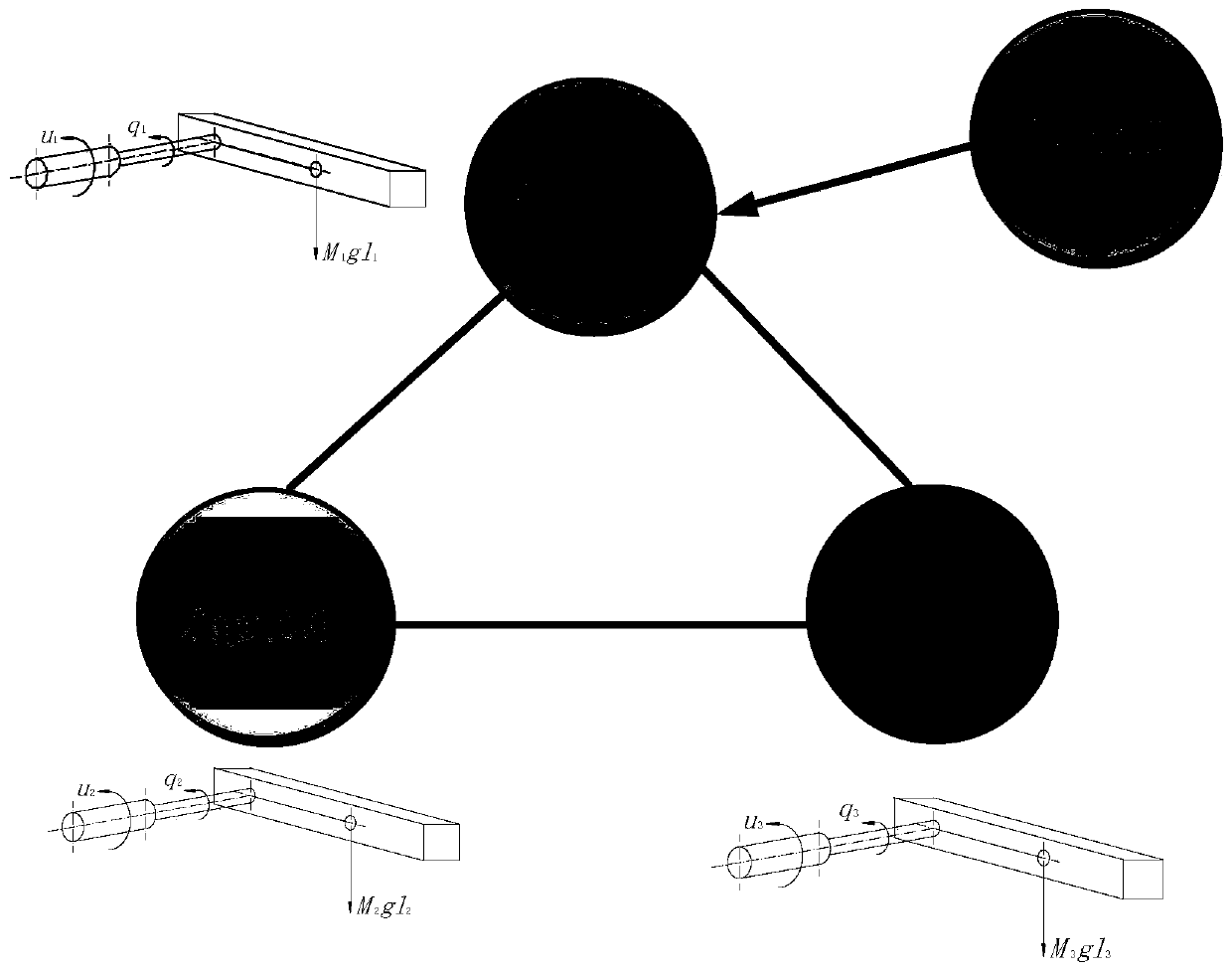
[0061] Embodiment: Single-link manipulator multi-agent system scheduled time consistency tracking control
[0062] The single-link manipulator system is an important system in the field of industrial automation. The accuracy and rapidity of its coordinated control are of great significance to improve the efficiency and quality of completing action instructions. The level of industrial automation in my country is of great significance. Taking the single-link manipulator multi-agent system as an example to illustrate the effectiveness of the above-mentioned predetermined time consistent tracking control method. The single-link manipulator multi-agent system is composed of 3 follower agents and 1 leader agent, and its interaction topology is as follows: figure 2 shown. The dynamics of a follower agent can be described as:
[0063]
[0064] in, q i represent the angular acceleration, angular velocity and angular position of the i-th connection, J i Indicates the total mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More