

Segmentation-based hidden Markov model map matching method
A hidden Markov and model map technology, applied in road network navigators and other directions, can solve the problems of error sensitivity and low efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
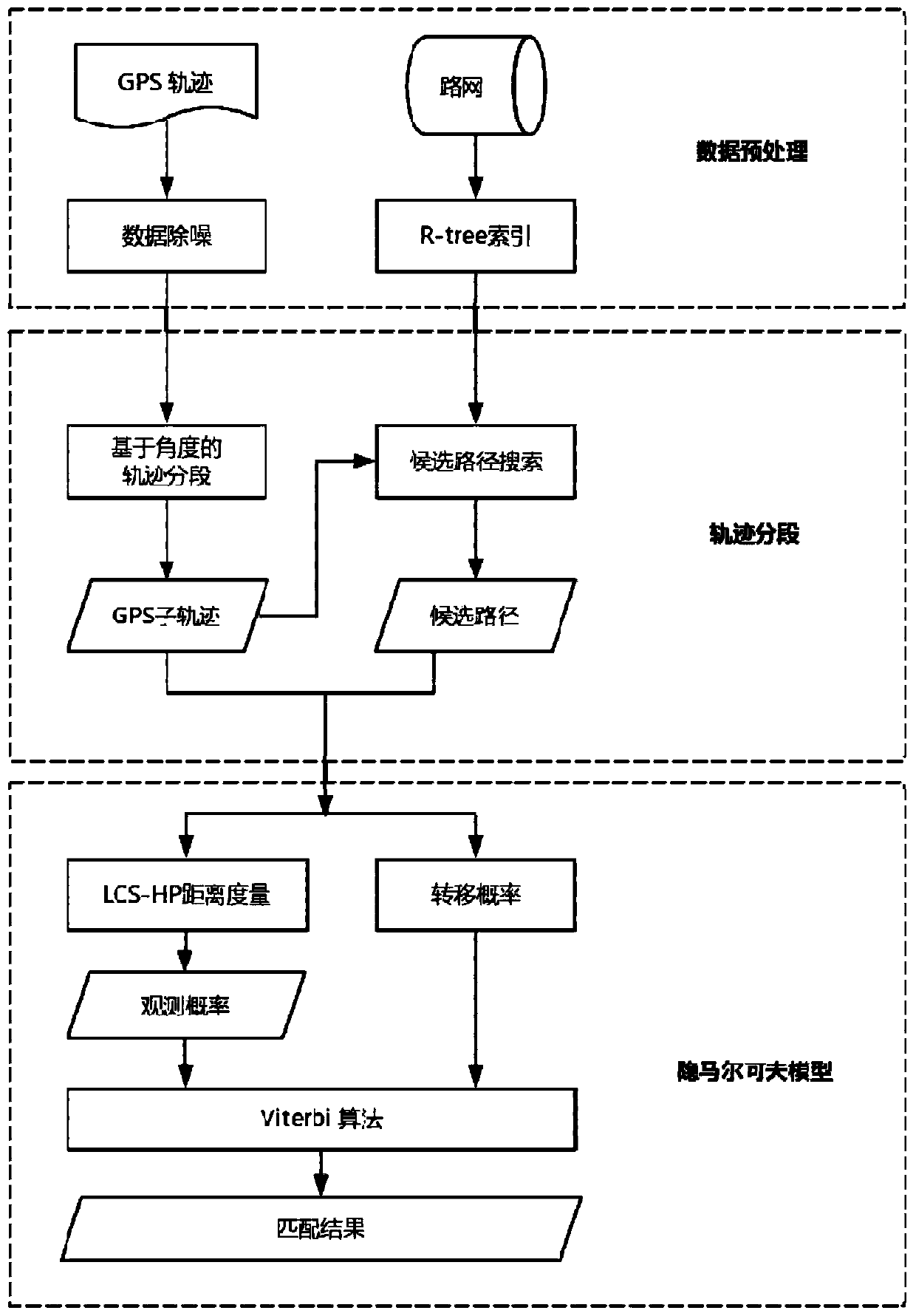
[0051] This embodiment provides a segmentation-based hidden Markov model map matching method, the overall framework is as follows figure 1 , is mainly divided into three layers: data preprocessing layer, trajectory segmentation and candidate path search layer, hidden Markov model matching layer, the specific implementation steps of this method are as follows:
[0052] Step 1, data preprocessing:
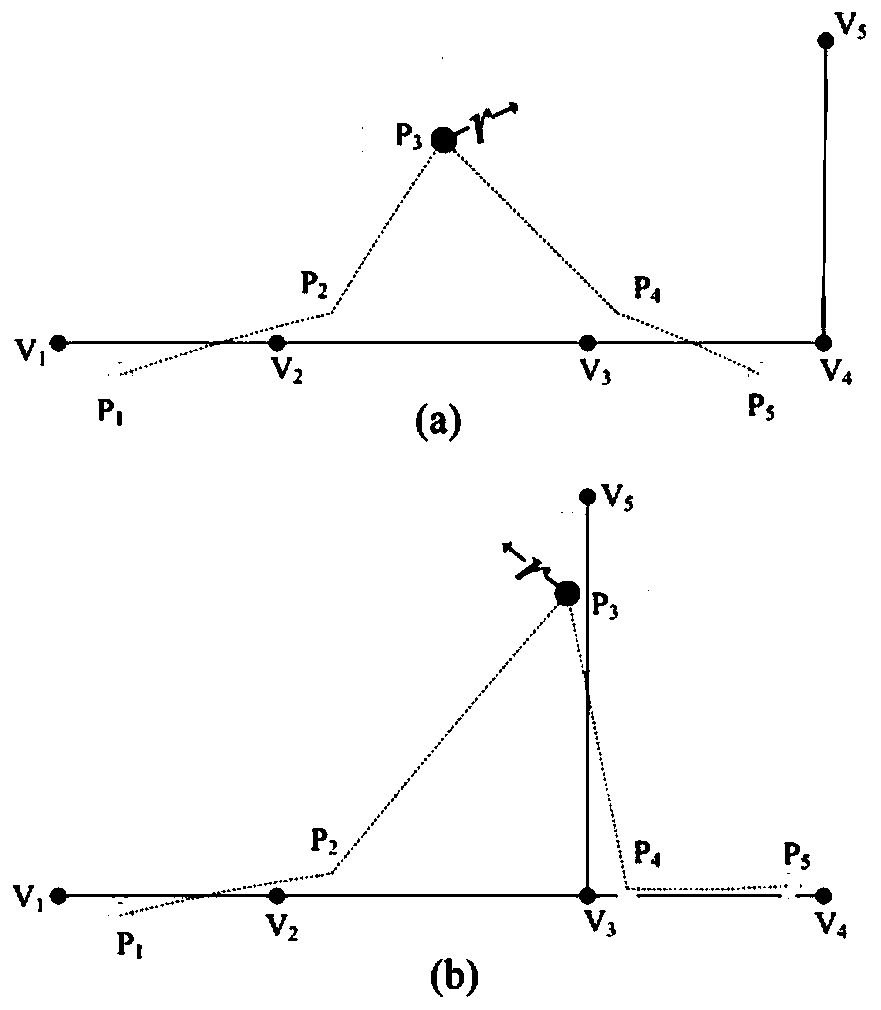
[0053] The two methods of removing noise data used in this method are both conventional methods, and only a brief description is given: In order to avoid the impact of noise in the trajectory data on the final matching performance, the original trajectory data is preprocessed, and the noise data is processed. remove. First, assume that if a GPS point is far from any road segment, it is less likely to match the road network. Given a distance threshold r(40m), if there is no road segment within the radius r of a GPS point, the GPS point is considered noise. like figure 2 as shown,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More