

Rapid three-dimensional track planning method of unmanned aerial vehicle taking into account complex environment constraints
A complex environment, UAV technology, applied in navigation computing tools and other directions, can solve the problem of lack of optimal path considerations, inability to take into account the complex environment constraints UAV's own performance constraints and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0105] Exemplary embodiments of the present invention will now be described in detail with reference to the accompanying drawings. It should be understood that the implementations shown and described in the drawings are only exemplary, intended to explain the principle and spirit of the present invention, rather than limit the scope of the present invention.
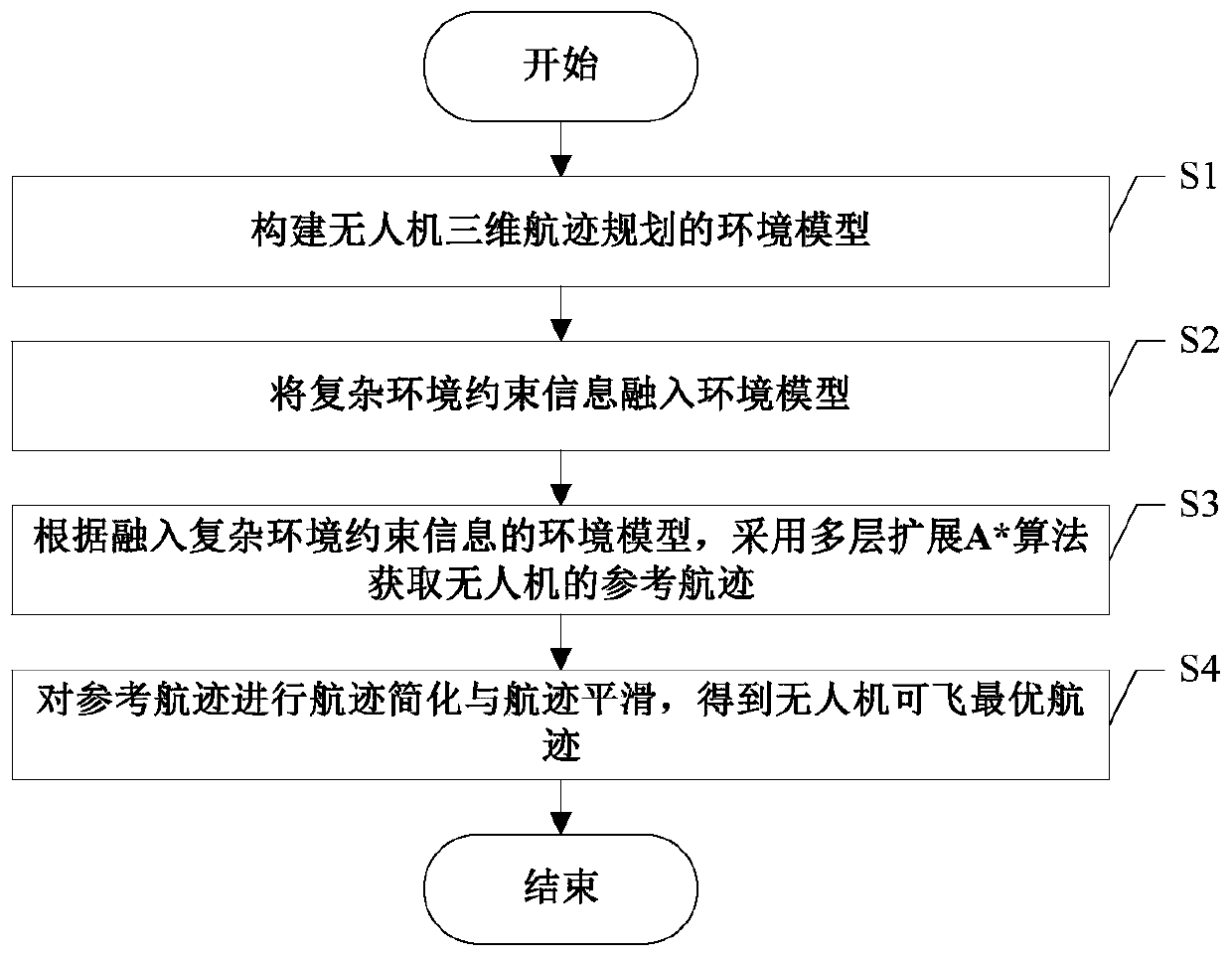
[0106] The embodiment of the present invention provides a method for rapid planning of UAV three-dimensional track taking into account complex environmental constraints, such as figure 1 As shown, the following steps S1-S4 are included:
[0107] S1. Construct an environment model for 3D track planning of UAV.
[0108] In order to fit the way the algorithm searches in the grid space, the environment model also needs to be constructed based on the regular grid. The main method is as follows: Since there is a minimum inertial distance constraint when the UAV changes direction, the minimum inertial distance can be used as ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More