

Quadruped robot capable of achieving gait control through front-rear traction and up-down rolling
A quadruped robot and gait control technology, applied in the field of robotics, can solve the problems of high cost, complex gait control and structure, and difficulty in mass production of quadruped bionic robots, achieving clear structure, simple structure, and low cost. low effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] In order to make the technical problems, technical solutions and beneficial effects to be solved by the present invention clearer and clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
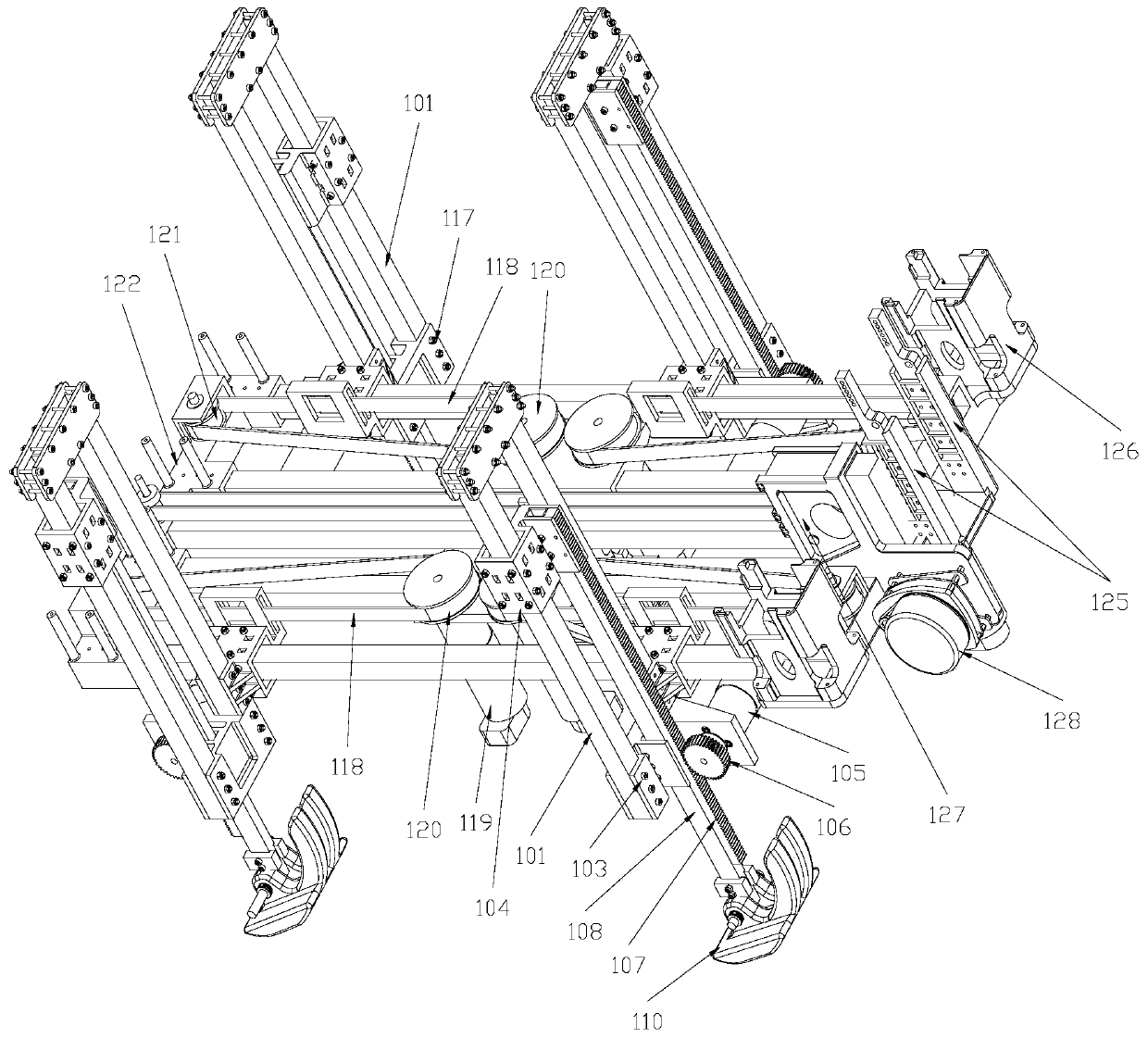
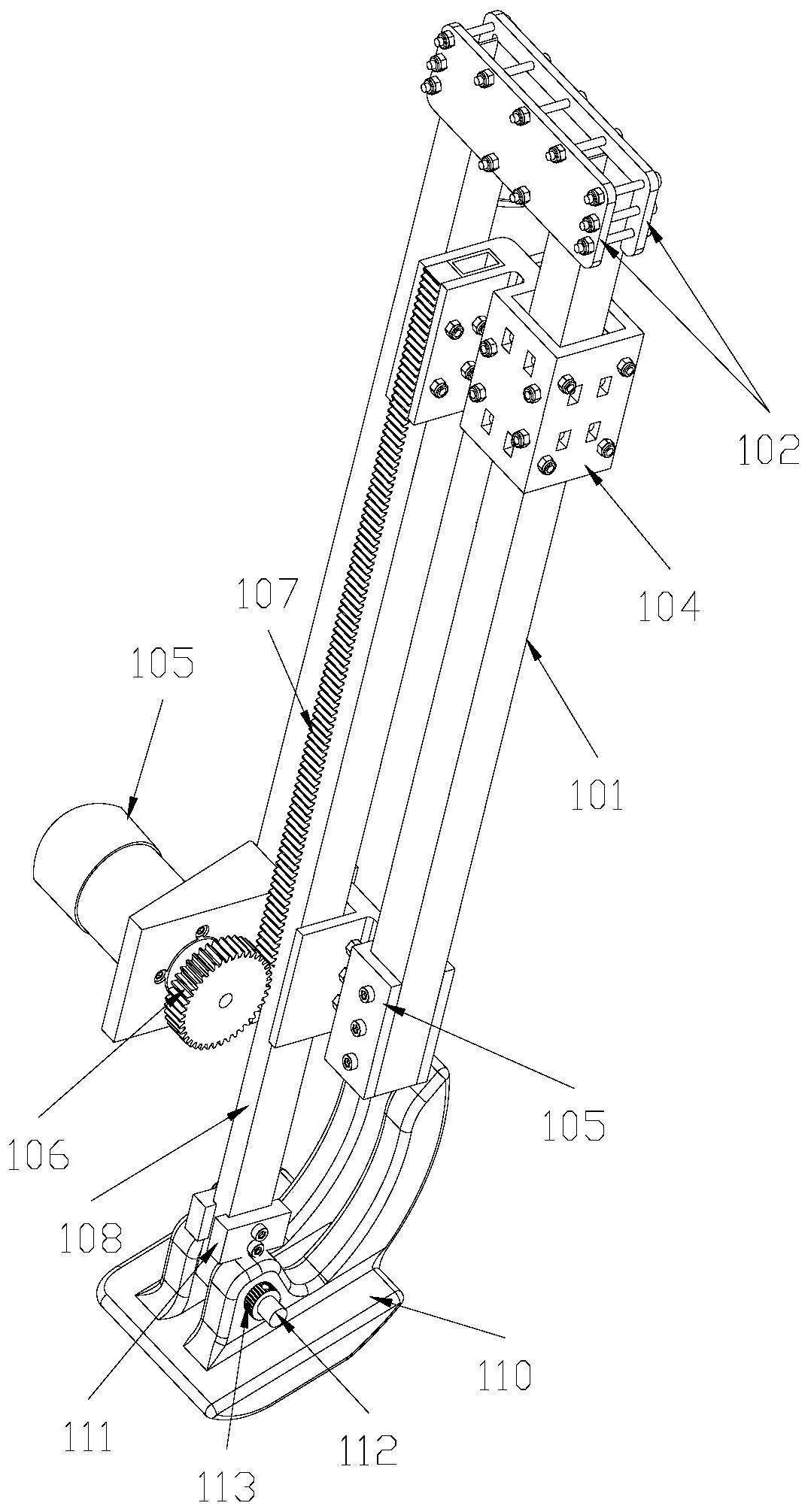
[0035] Such as figure 1 As shown, the present invention includes a power supply, a main body frame, a calf support tube 108, a leg support frame 101, a longitudinal drive unit, a longitudinal movement slider 104, a foot structure 110, a transverse drive unit, a transverse movement slider 117 and a self-balancing module .
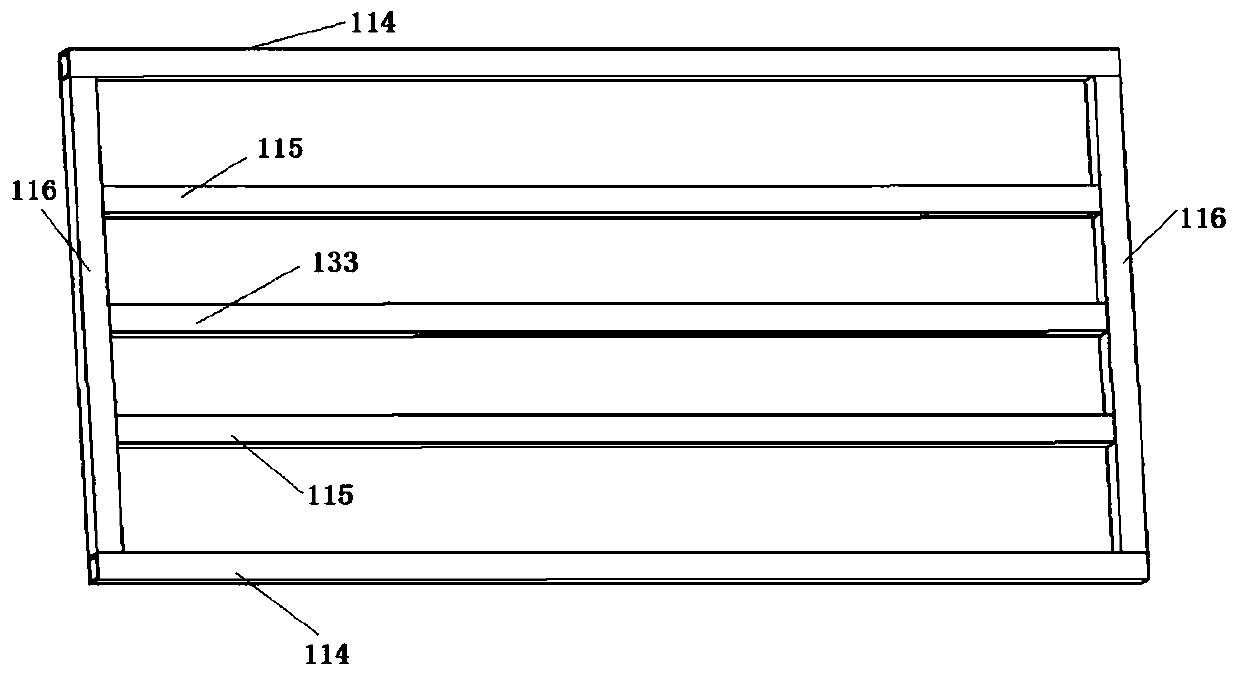
[0036] Such as figure 2 As shown, the main frame has a rectangular structure and is made of aluminum tubes. The main frame is provided with five cross bars, including a symmetrically arranged outer cross bar 114, a symmetrically arranged second cross bar 115, and a middle cross bar 133. The main frame Side bars 116 are respectively arranged at both ends of the cross bar and the sid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More