

Inverse matrix-free self-adaptive filtering-based SINS (strap-down inertial navigation)/DVL (Doppler velocity log) combined positioning method
A technology of adaptive filtering and combined positioning, which is applied in the re-radiation of sound waves, radio wave measurement systems, and navigation through velocity/acceleration measurement, etc. high degree issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
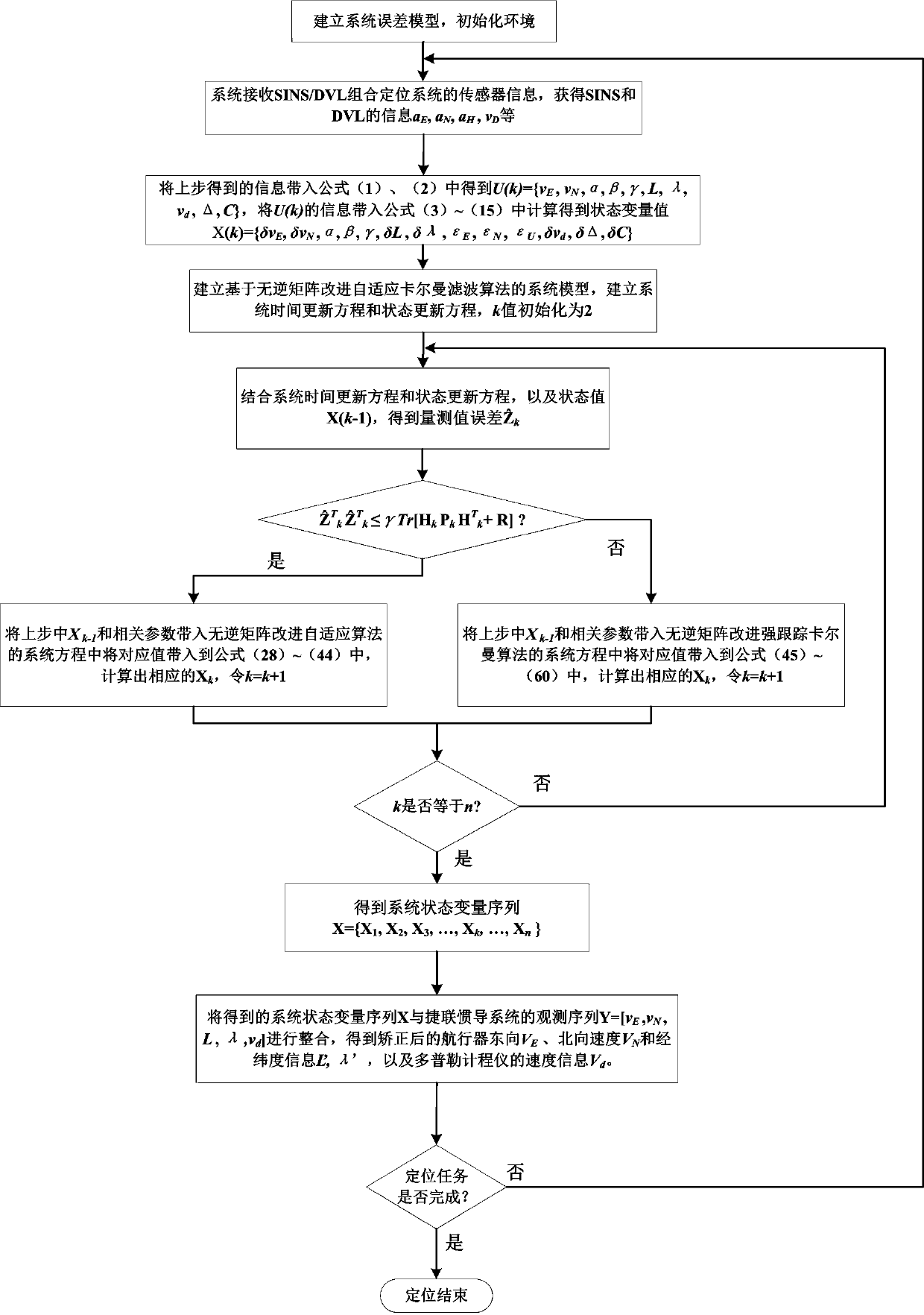
[0112] combine figure 1 Describe this embodiment, a kind of SINS / DVL combined positioning method without inverse matrix adaptive filtering described in this embodiment comprises the following steps:
[0113] Step 1, the system establishes the SINS / DVL combined positioning error model state variable X=[δv E δv N α β γ δL δλ ε E ε N ε U δv d δΔδC] T , where δv E and δv N α, β, γ are platform misalignment angles, δL and δλ are longitude and latitude errors, ε E , ε N , ε U is the gyro drift in the east, north and sky directions, δv d is the Doppler measurement velocity offset error, δΔ is the bias angle error, and δC is the scale coefficient error;
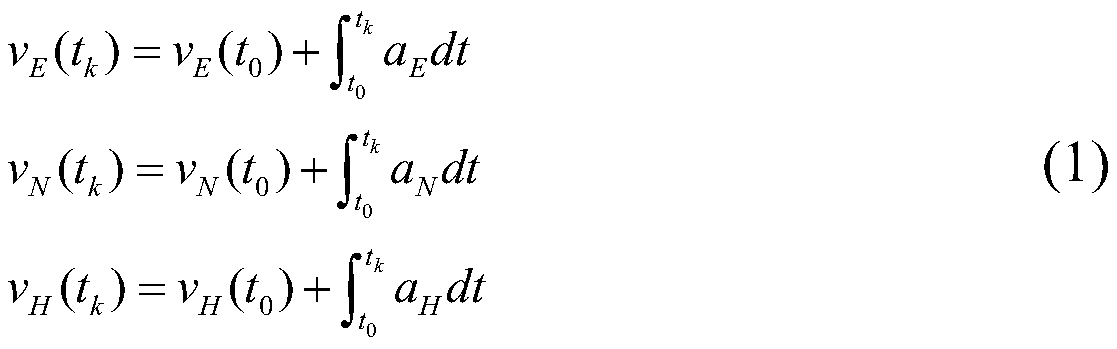
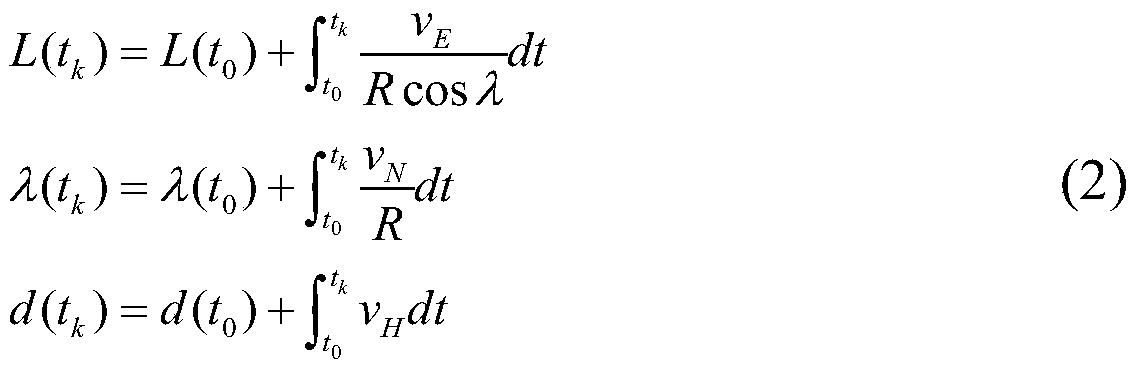
[0114] Step 2, the system measures the three-axis (east, north, sky) acceleration information a through the three-axis angular velocity information of the gyroscope sensitive carrier in the inertial navigation component and the accelerometer E 、a N 、a H , Velocity v obtained by Doppler log d , navigation informa...
specific Embodiment approach 2
[0218] Specific embodiment two, this embodiment is a further description of step seven of the SINS / DVL combined positioning method without inverse matrix adaptive filtering described in specific embodiment one, in this embodiment, according to the error and expectation of filtering estimation The relationship between the size of the error is used as a criterion for judging whether the filtering is divergent.
specific Embodiment approach 3
[0219] Specific embodiment 3, this embodiment is a further description of step 8 and step 9 of the SINS / DVL combined positioning method without inverse matrix adaptive filtering described in specific embodiment 1. In this embodiment, a method that can ensure The non-inverted matrix operation method of filtering accuracy and reliability avoids the matrix inversion operation process, and on the basis of reducing the amount of calculation, it ensures the reliability and stability of the operation process and improves the positioning accuracy of long-distance underwater autonomous navigation.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More