

A method to obtain point cloud road height in unity
A point cloud and height technology, applied in image analysis, instruments, calculations, etc., can solve problems such as low degree of automation and point cloud height will not be completely flat, so as to reduce workload, reduce human error, and reduce memory usage Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
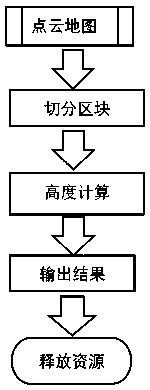
[0045] As a general-purpose graphics engine, Unity integrates a third-party physics engine, which can meet the needs of physics and image simulation in the field of autonomous driving. Thanks to these advantages, we can implement a new method of efficiently obtaining lidar point clouds in the newer version of Unity. The overall implementation process is as follows figure 1 shown, including the following steps:
[0046] Step 1. Obtain the point cloud map of the entire scene.
[0047] Step 2: Segment the point cloud map to obtain multiple blocks, that is, figure 2 As shown, the point cloud of the whole scene is divided into small point clouds according to the blocks.
[0048] Generally, at least the following two methods can be used to obtain the segmented blocks: (1) The block segmentation is completed in the point cloud map export stage, and a small point cloud map file (usually a pcd file) is exported.
[0049] (2) Use the Unity engine to segment the point clo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More