Method for checking and correcting collision avoidance decision of unmanned boat
An unmanned boat and collision avoidance technology, applied in the field of navigation and navigation, can solve the problems of decision-making verification, unable to guarantee the new or greater danger of unmanned boats, etc., to achieve the effect of ensuring the safety of navigation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] Embodiments of the present invention will be described in further detail below in conjunction with the accompanying drawings.
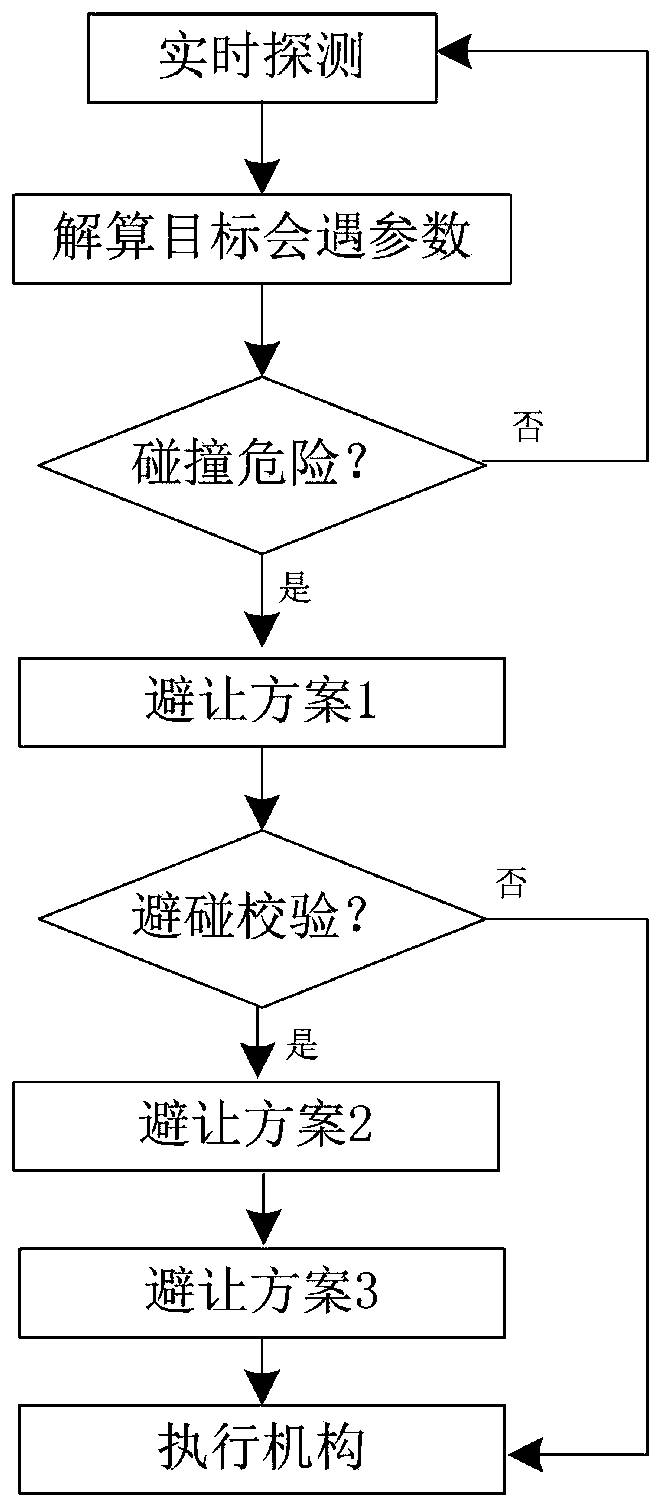
[0022] A verification and correction method for collision avoidance decisions of unmanned boats, such as figure 1 shown, including the following steps:
[0023] Step 1. Calculate the encounter parameters of the obstacles or dynamic ships encountered by the unmanned boat, and judge whether there is a risk of collision.
[0024] Calculate the shortest encounter distance DCPA and the shortest encounter time TCPA according to the navigation parameters of the unmanned boat and the target motion parameters detected by the radar, and compare them with the safe encounter distance SDA of the unmanned boat. If DCPA<SDA, there is an avoidance If there is no danger of collision, proceed to step 2; otherwise, continue sailing as planned if there is no danger of collision avoidance.
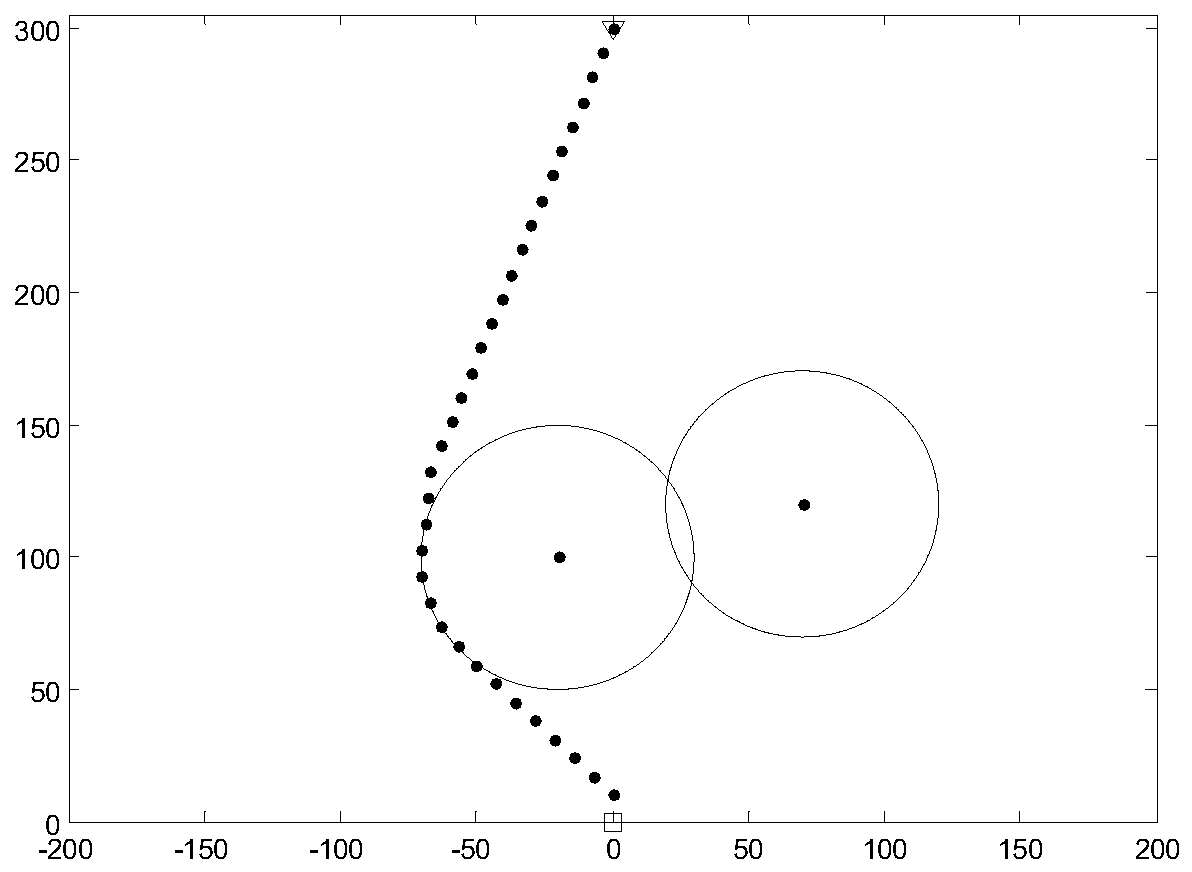
[0025] Such as figure 2 As shown, the targets in the picture are all s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More