Automatic registration method and device for unmanned aerial vehicle images and electronic device
An automatic registration and unmanned aerial vehicle technology, applied in image enhancement, image analysis, image data processing, etc., can solve problems such as high cost, low value of image data, and inability to apply quantitative analysis, etc., to solve high cost and improve The effect of data value
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
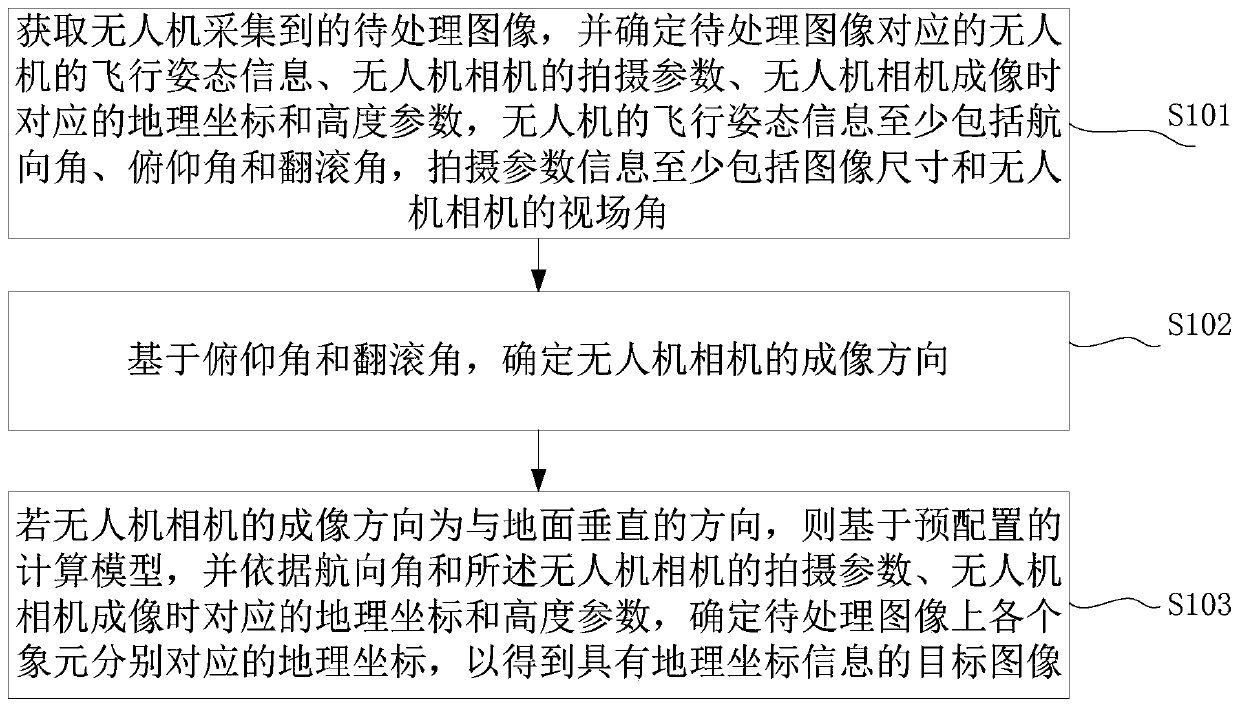
[0028] The embodiment of the present application provides an automatic registration method for UAV images, such as figure 1 As shown, the method includes: step S101, step S102 and step S103.
[0029] Step S101, obtain the image to be processed collected by the UAV, and determine the flight attitude information of the UAV corresponding to the image to be processed, the shooting parameters of the UAV camera, and the corresponding geographic coordinates and altitude parameters when the UAV camera is imaged , the flight attitude information of the drone includes at least heading angle, pitch angle and roll angle, and the shooting parameters include at least the image size and the field of view angle of the drone camera.
[0030] In the embodiment of the present application, the electronic device acquires the image to be processed (that is, image data) collected by the camera of the drone, and the flight attitude information of the drone corresponding to the image to be processed, ...
Embodiment 2
[0075] The embodiment of the present application provides an automatic registration device for drone images, such as Figure 4 As shown, the automatic registration device 30 of the drone image includes: a data acquisition module 301, an image screening module 302, and an automatic registration module 303 of the drone image, wherein,
[0076] The data acquisition module 301 is used to acquire the image to be processed collected by the UAV, and determine the flight attitude information of the UAV corresponding to the image to be processed, the shooting parameters of the UAV camera, and the corresponding geographic location when the UAV camera is imaged. Coordinate and altitude parameters, the flight attitude information of the UAV includes at least the heading angle, pitch angle and roll angle, and the shooting parameter information includes at least the image size and the field of view of the UAV camera;
[0077] The image screening module 302 is used to determine the imaging d...
Embodiment 3
[0101] The embodiment of the present application provides an electronic device, such as Figure 5 as shown, Figure 5 The electronic device 400 shown includes: a processor 4001 and a memory 4003 . Wherein, the processor 4001 is connected to the memory 4003 , such as through a bus 4002 . Further, the electronic device 400 may further include a transceiver 4004 . It should be noted that, in practical applications, the transceiver 4004 is not limited to one, and the structure of the electronic device 400 does not limit the embodiment of the present application.
[0102] The processor 4001 may be a CPU, a general processor, DSP, ASIC, FPGA or other programmable logic devices, transistor logic devices, hardware components or any combination thereof. It can implement or execute the various illustrative logical blocks, modules and circuits described in connection with the present disclosure. The processor 4001 may also be a combination that implements computing functions, for exa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com